It is not the first time it happens, but previously I suspect bad compass , Gps gliches, solar storms .
before flight I check everything twice and all was going well.
The symptoms that something is going bad soon is the heading that change of some degrees or start to go in one direction.
In dataflash log just before minute 9 you can see a variation in both MAG.MagX andxMAG2.MagX.
That time it start rotated on yaw but it stop or I control it with Yaw stick, do not remember.
It happened again before uncontrolled descent/crash at minute 19.
It start to yaw right for some 150°, I switched to stabilized mode trying to keep the copter up giving more throttle and yaw command bur the hexa do not responds to radio sticks and gently went down in stable attitude , almost as if it was landing automatically but with no control from radio and a little bit fast.
No damages , or crash event on Mission Planner .
No error messages, no warnings , no EKF compass errors, Esc or motors were not hot at all.
Almost no vibrations at all.
Batteries when copter decided to “land” were at 14.6 Volts , the day after I did a test on a twin copter with different Esc and Ubecs that powered the Pixhawk and was able to fly 10 more minutes after minute 19 of crash.
So batteries are not the problem , when I charged them , they show the same amount of mAh drawn.
Looking at dataflash log what is really without explanation to me is :
Desired Altitude change by itself while I was in Loiter mode !
Pixhawk received the Throttle command but rose only apparently two motors while the other 4 were reduced.
Even if I was in Stabilize mode I do not have anymore the control even if the receiver got sticks commands.
Yaw rotation in coincidence with Mag error , a cause or a consequence ? bin. Log File
We see from the log that the throttle level was increasing as it flew. At some point the copter started to yaw clockwise and the controller increased motors 1, 3, and 6 to counter this yaw but the copter continued to yaw.
The throttle out went to max as well as motors 1,3 and 6. Since the motors were under powered to start with and the heat was high, I think that one of the motors or ESC’s got over heated and stopped working.
Looks to me that the flight controller did what it was suppose to do.
Hi Mike,
thanks for reply .
Why the motors that the controller increased were 1,3, and 6 ?
I expected it was motor 5 an dnot motor 6 .
It might be just a color error on the dataflash graph ?
Something gave command to the motors to Yaw and to loose altitude, it was not me so I suspect that EKF decided to Yaw and to loose altitude.
Motors 1, 3 and 6 turn in one direction so these are the one that will increase to stop the copter from yawing. It was not a command to yaw the copter but rather the copter saw it was turning and tried to stop it from turning. Lack of power from trying to counter the yaw caused it to slowly fall to the ground.
It is not a lack of power but a deliberate behavior from the EKF failsafe system.
The clues are that if you look at the logs you will see both DES YAW and DES ALT that change .
Since I was in Loiter mode there was no reason for changing the desired Altitude and the Yaw .
The weird thing (bug ? ) is that the copter did not respond to commands .
As you had notice when it received a full throttle command by the CH3 of radio it ignore it .
I did some other test with the copter that had the Yaw problem and it did it again .
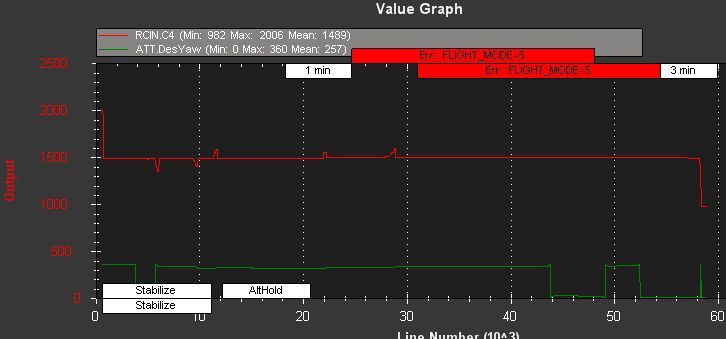
I was in Alt Hold since not 3D fix for Gps for Loiter, that why Flight Mode 5 error.
Bad heading and after a while a 90° yaw rotation.
This time no loss of control or altitude .
Look at this screenshot
My RC Yaw input remains always the same but magically after minute 2 DesYaw change and the copter rotates by itself
Who else if not EKF , the “great bastard” ?
You’ll find an explanation here where a developer explain what happens if your Yaw Pid is weak
I think what we’re seeing here is just a loss of control because the battery is nearly depleted. It looks like it’s a 4S battery and after nearly 20min it’s fallen from 17-ish volts to about 14.5V. Right at the end you can see the total requested throttle sent to the motors goes to 100%.
Hi Randy, thanks for the reply.
the copter with the same battery pack (two new high quality (250USD both ) 12900mAh 25C 4S) once the YAW Pids were set by Autotune flew in exactly the same conditions 10 minutes more, till 13,7 volts when failsafe engage without any issue.Not one but several times.
A depleted battery at 100% motors request , 33A in this case, at the voltage of 14,5 Volts would have fall in voltage a lot, at the contrary, you do not see any voltage difference .
It is like if the radio sticks were ignored.
There is another strange aspect , the DesAlt change while in Loiter and after in AltHold but if you take a look at RcIn3, throttle , it did not chage .
So what change Des ALt ?
Yesterday I got again strange problems , It happended after I save and load configuration file.
Sudden Yaw changes without any input from radio stick, a arming switch alert while the arming switch was disable (checked twice reading again all parameter list) .
The Yaw changes were sudden and happens almost immediately in stabilize mode, after a new radio calibration the problem seems to have disappear.
I will post the .bin file .
Is it possible that where parameters are written , internal 2mb memory I guess, is corrupt ?
Is there a way to check it ?