Hi there, are you looking for a transducer for your autonomous boat that doesn’t cost thousands of dollars? So was I. This is how I set up the $300 Airmar DST800 triducer. Hopefully you find this helpful
Troubleshooting:
I used a rs-485 to USB converter to plug into my computer. to view the NMEA messages simply open putty (windows), select the appropriate com port (you can check in device manager on windows) and select 4800 baud rate. You may need to swap around the NMEA A and B cables to get it to work. You can google a NMEA 0183 sentence guide to decode the message.
That would be great! Unfortunately mission planner can only display sonar range, but this transducer also transmits temperature and wind speed. Would you be interested in developing those functionalities? My company could send you a model to work with if needed.
if you have a spare sensor that would be great. I’m hoping to be able to re-use the wind-speed estimator in the EKF for calculating the ‘water speed’ for tides or flow on a river. I guess the first thing to do would be to add in a ‘tide’ to the boat SITL and see how the EKF manages to estimate. Then look at adding the sensor into the airspeed library probably. Although i’m not sure of the best way to handle sensors like this that have things for different library’s all coming down the one bus. I guess the best way would be to handle it in the rangefinder library and forward the appropriate stuff to airspeed.
I’d just like to point out that there are different variants of DST800 transducers. And from what I can tell from finally contacting the manufacturer the one @evan is referring to is the DST800PV-S
I haven’t gotten it working yet (because I need to get a new transducer) but I do know now that the DST800-P617V will not work.
I actually don’t necessarily prefer this sensor but I cant seem to find another one from a stateside vendor my company is okay buying from… aaaaand I don’t really know what I’m doing.
Hi, I am trying to get this to work on ardurover V4.4 and tried V5.5
I have it all wired up per the rover documentation, but I am getting no current on the transducer power supply and no data in mission planner. Any help would be appreciated.
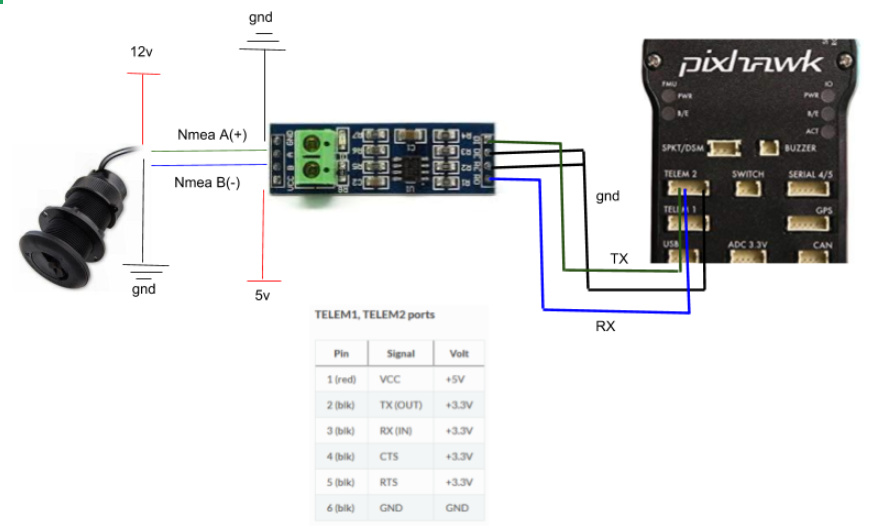
I have used the transom-mount version with ardupilot, I needed a logic inverter/level converter to change the data signal to TTL logic, I used a single transistor inverter circuit which maybe isn’t to spec but worked for my unit. There is a proper circuit at the top of this thread.
To test your unit I would hook it up to a serial to USB cable and try it on a PC with OpenCPN or other NMEA software or maybe a serial monitor program to see that it is sending data at 4800 baud.