I have a 5 second DISARM_DELAY set, and have observed this behavior with autonomous flights when an automatic landing is performed.
In my opinion, this is not a problem, and is instead an important feature of operational safety. The airplane will not allow itself to be rearmed until the operator intentionally and specifically resets the mission. Otherwise, it would be possible for the aircraft to land in AUTO mode and an unintentional arming would send it on it’s way again (also assuming you wanted the mission to reset). The current two-step process requires an intentional action from the operator before you can fly again in AUTO mode. That’s a good thing, and I encourage everyone flying in AUTO mode to view this as a safety interlock feature and not an annoyance.
We have also noticed this problem in real flights and where also able to stage this in sim with arduplane 4.3.0.
The plane actually disarms using DISARM_DELAY but still thinks it hasnt finished its mission yet. Do you guys really thinks this is right? As working DISARM_DELAY indicated to me as user it really thinks it finished its mission, but it seams that the plane still has its in_landing_sequence_flag set (as done via Plane: refuse arming if we are in a landing sequence · ArduPilot/ardupilot@20f641d · GitHub) ?
I can mitigate this by manually adjusting the next waypoint after landing to the takeoff point in QGC, but this looks like a rather hacky way.
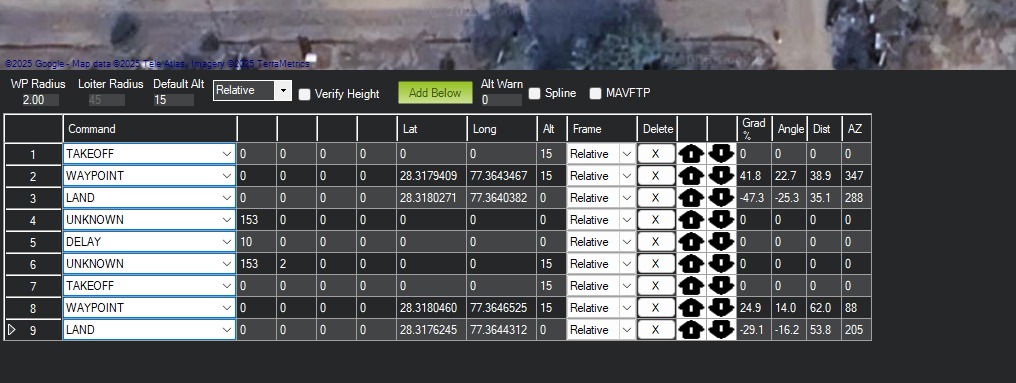
Same steps i use in my mission.But simulation it is Working I’m going try in drone it’s not working 1st set of takeoff landing working after landing it’s not takeoff
Anyone give a solution