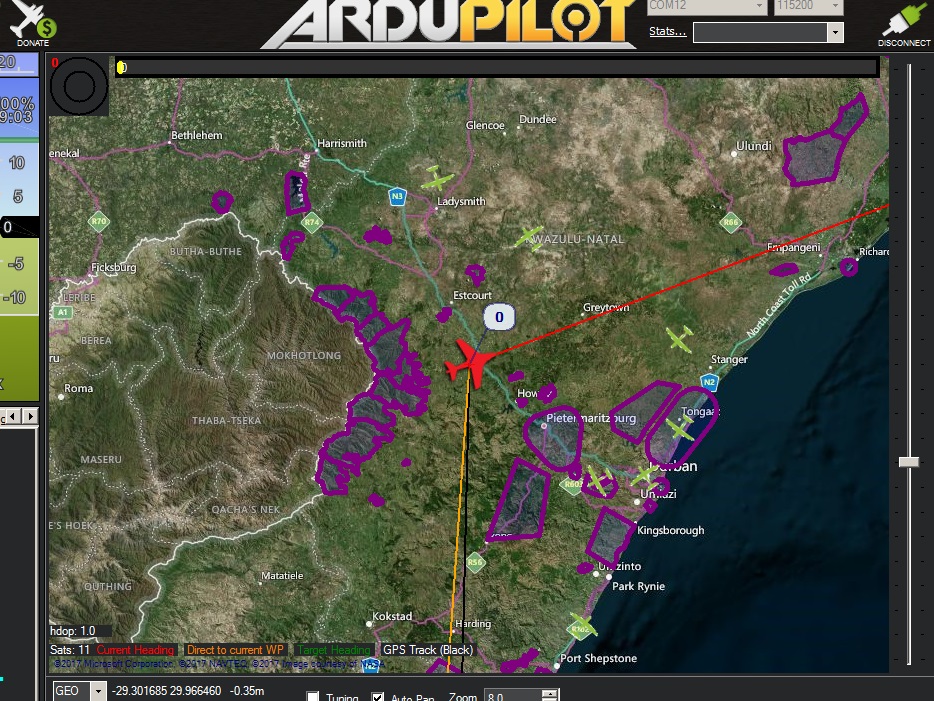
It’s Mission Planner all the way if you want ADS-B, you can even feed multiple receivers in for a bigger picture. (See over the mountains)