I now have a UAVIONICS PingRX ADS-B receiver operational on my Solo! ArduCopter master (v3.5-RC8 / Green Cube) and the PingRX receiver on accessory bay serial 2. It receives ADS-B data from aircraft equipped with ADS-B out (UAT or Mode-S). The receiver is attached to the side, with antennas vertical as required. A small hole in the side of the body lets the wires in, where they are soldered to the accessory bay header serial 2, 5 volt, and ground.

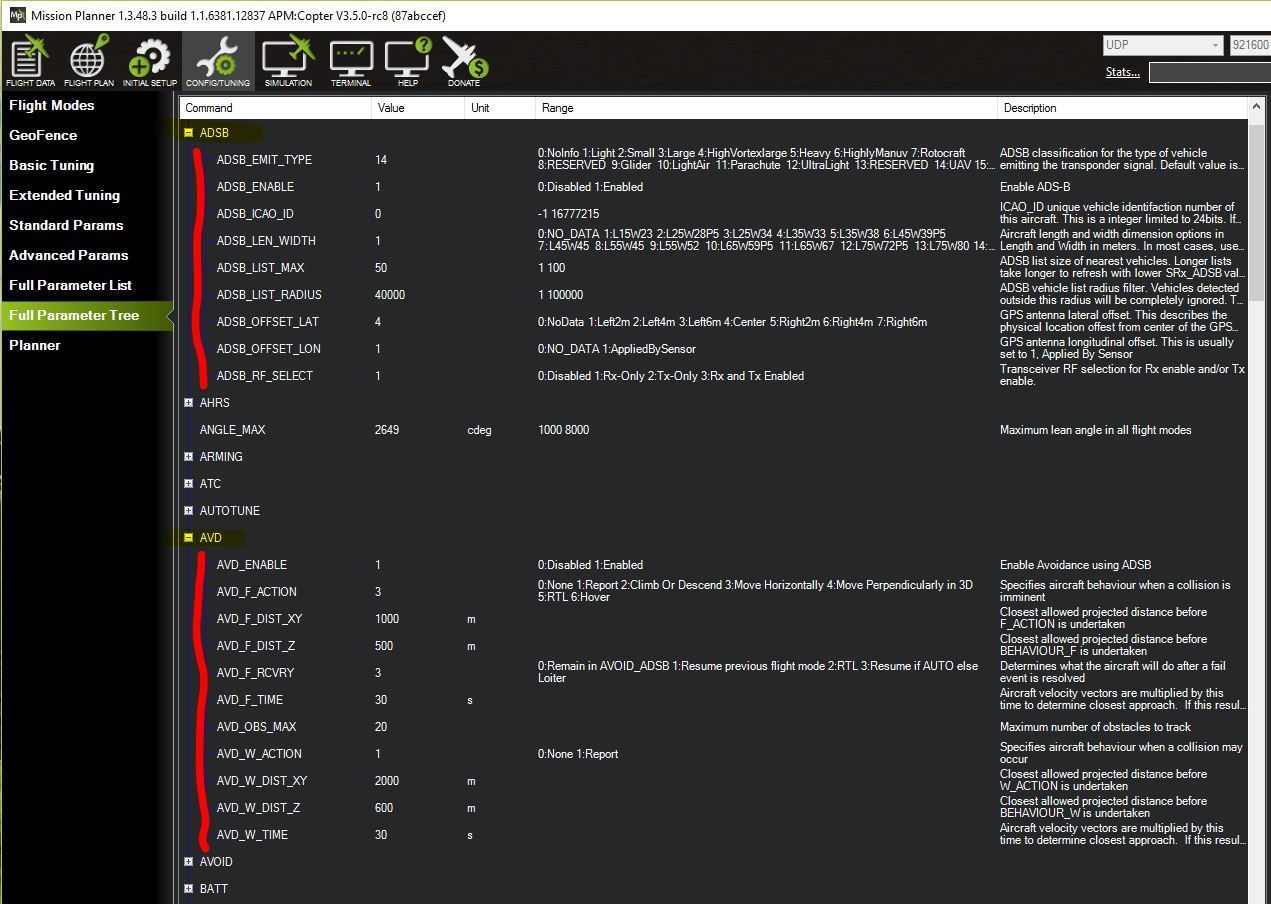
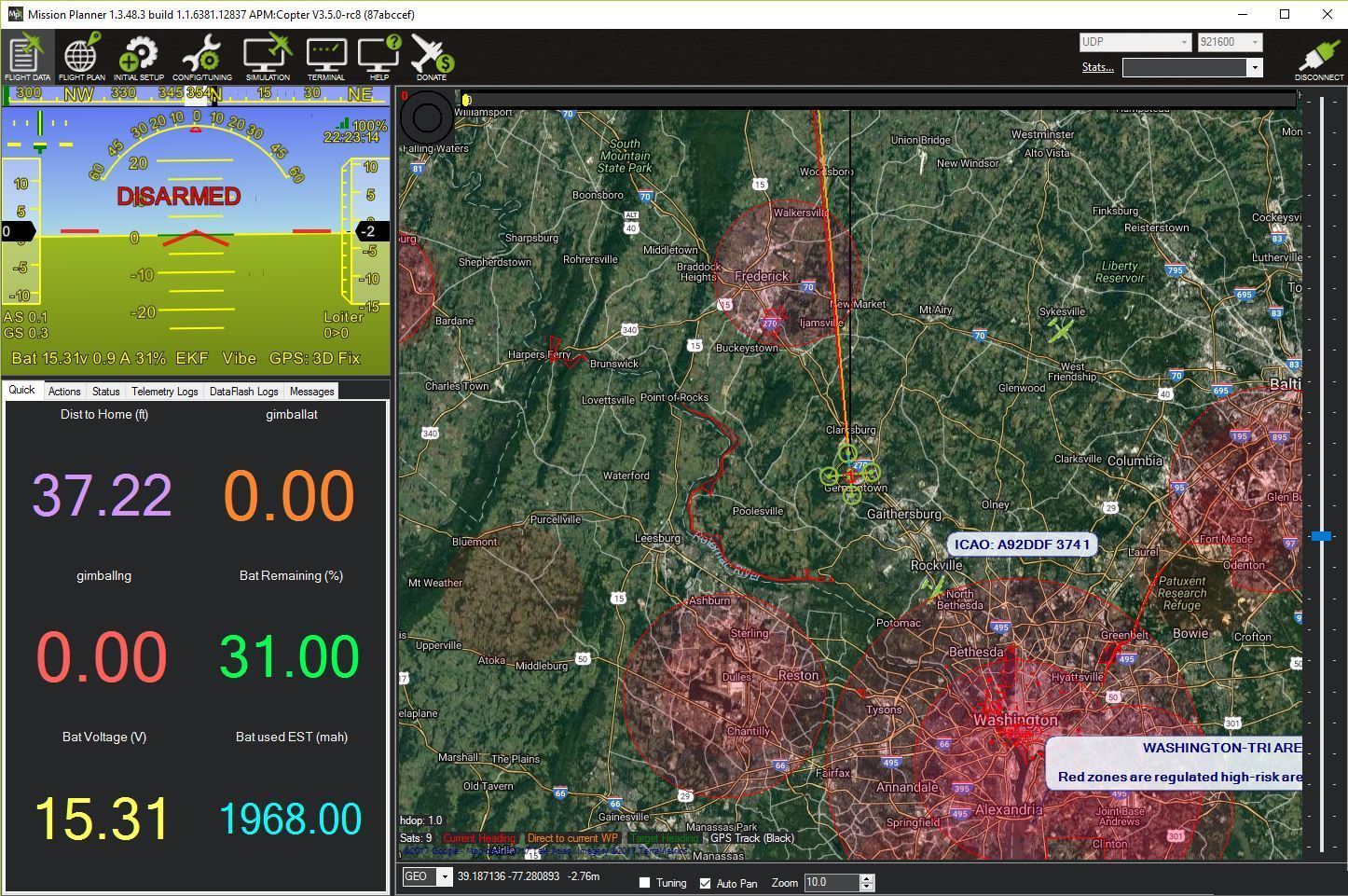
As I’ve configured it for now, it will display aircraft on the map out to 10 miles. Aircraft within 1000 meter radius around and 500 meter radius vertically will be considered a collision threat. The Solo will take automatic evasive action, kind of like a TCAS RA. Currently it is set to move horizontally out of the way, but it can also move 3 dimensionally. I think I may need to reduce the collision threat radius, because I think it will continue evading until it is 500 or 1000 meters clear of conflict, which is a little crazy. I need to do a little more research on how exactly it will respond.
In the map below from Mission Planner, you can see two nearby aircraft that solo detected simply sitting out on my back deck.
To answer the inevitable first question: No, it will not work on a stock solo with stock firmware. This didn’t exist when 3DR forked the early beta of ArduCopter 3.3, therefore it doesn’t have any means to function on stock 3DR firmware. You need to be on ArduCopter 3.5+, and to do that safely and reliably today, you need the Pixhawk 2.1 Green Cube to replace the stock Pixhawk 2.0.
To answer the inevitable second question, what aircraft can this detect? It can detect any aircraft equipped with ADS-B OUT. Which means a Mode-S transponder or a UAT. Most commercial airliners, modern private jets, and other high end private aircraft have this. I think most medevac, law enforcement, rescue, etc helicopters will have it, which is good since they are a higher risk to small UAS. Your weekend warrior fair weather fliers cruising low and slow (think cessna 152s, etc) probably do not, and they are the other obvious high risk to small UAS.
The third question will be “how do you test this?” Answer: very carefully :). It works great in SITL simulation. Testing this in reality (outside simulation) is a little more tricky for what i consider to be obvious reasons. I plan to grossly expand the treat radius to get an aircraft far away to trigger it and see how it responds.
Links:
http://ardupilot.org/copter/docs/common-ads-b-receiver.html