I am trying to configure my VTOL on mission planner. I am using tilt rotor UAV. there are 4 tilt rotors and 2 other rotors to help during hover with aileron and V tail.
I am trying to figure out where should i add the position of all the rotors and inertia of the UAV? I am not able to find such parameters in the full parameter list.
I have an additional question, should while doing install firmware, should i choose copter or fixed wing?
The two rotors next to CG are turned off after reaching to required altitude and will be used to land. In hover it takes only 30% of the MTOW while other four takes 70% of the MTOW.
Ah OK, didn’t know that. I see a post from Peter about using a Lua script to scale the Boost Motor via an RC switch. That would seem to open up many possibilities to control those motors.
i would check this one out. I have a question though on how to add mixer file as i can’t see a parameter in mission planner where i can change the distribution of thrust in unequal manner.
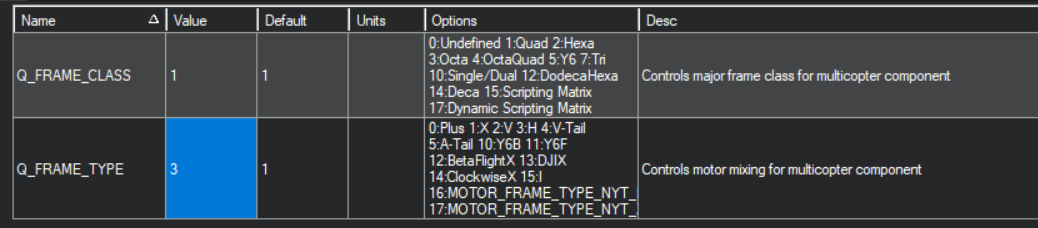
As I have 6 motors in total but only 4 are used for tilting, should i use Q_frame_class as 1 (quad) or 2 (hexa)?
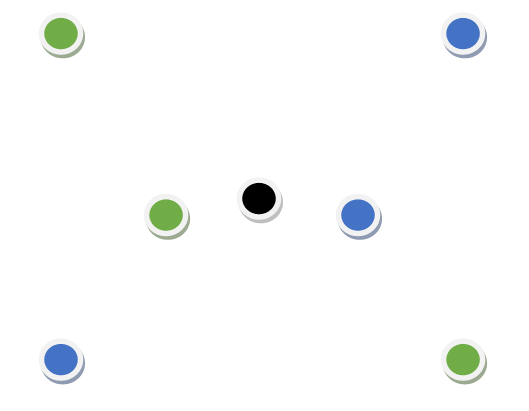
The tilt motors are in H position i.e., two hover boom in body x direction, making H configuration for 4 tilt rotor plus there is V tail in the model. So should i use 3 (H) or 4(V-tail) for the Q_frame_class?