Manoeuvering thruster (bow thruster or stern thruster) is a transversal propulsion device built into the bow or stern, of a boat to make it more manoeuvrable.
I now have an active autopilot for the boat (based on Pixhawk), I want to transfer it to my “Smit Rotterdam” model. This model has a bow thruster, and I would like to use it for autopilot.
Please add this function. This is similar to the existing “Vectored thrust” function, only the deviation angle has two fixed values - or + 180 degrees.

1 Like
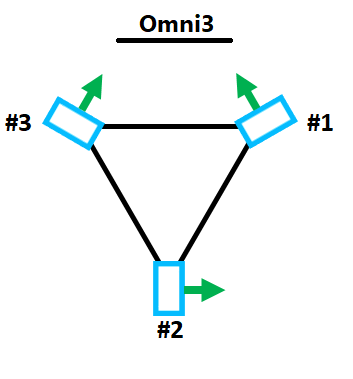
I wonder if you could work it as an OMNI3 with motors 1 and 3 as the rear screws and number 2 as the bow thruster. it might struggle with not being able to move the stern sideways .
the simpler option would be to just set it as another ground steering output like the rudder.
To use it as another steering wheel is the best at the moment for manual control. But if you add this as a new function, so that the autopilot understands that this is a motor that can create a moment. it would certainly be better. This would help for the LOITER mode.
its not really a new function as its just yawing the boat like a rudder. it cant push the boat sideways, so its limited to yaw same as the rudder, you can also set your main motors as left and right motors and it will automatically mix them for yaw control along with the bow thruster.
I agree, my curves in the equipment are configured so that it turns on at more than 80%. But if you need to use only thruster, then you will not be able to manage it this way.
Another way to do it would be a script that disables the bow thruster over a set ground speed so its off at higher speeds where its not required then mix it into the rudder at lower speeds.
The more i think about it I still think the omni 3 would work, even with the propellers shafts parallel, the combination of the propellers canceling out the yaw of the bow thruster would allow it to traverse laterally letting it hold position and heading simultaneously.
Both ideas are great, but I’m not that good at programming 
1 Like
omni3 should work without any programming, with the addition of the rudder giving some more authority at the rear it think it would work fine.
Did you ever try this out? Did it work?
It only works in manual mode.