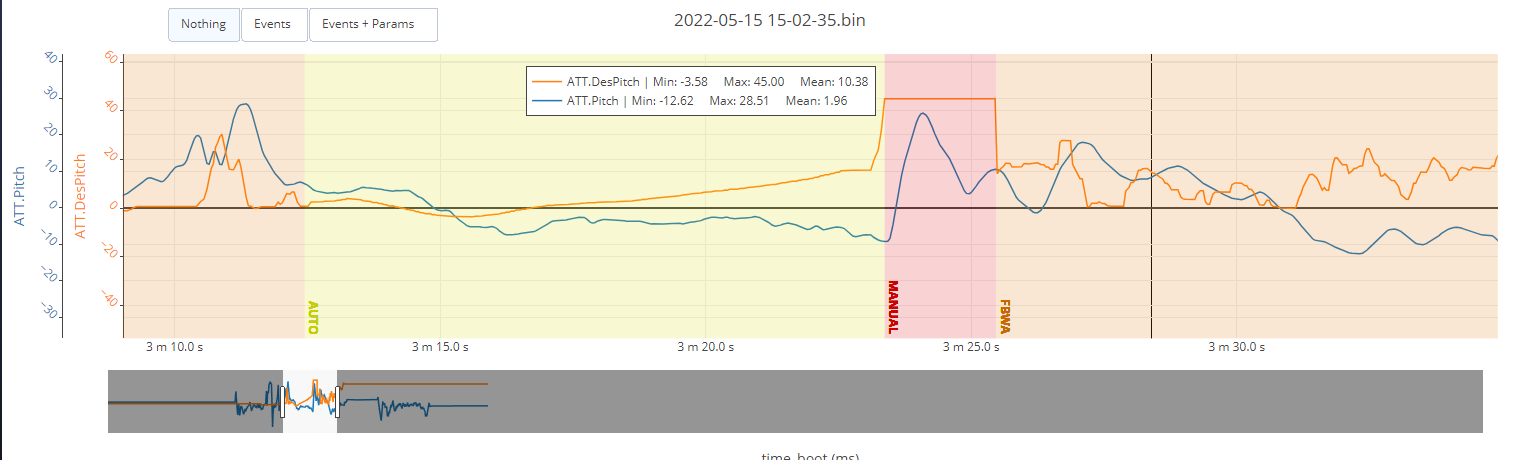
Hello, I am running Arduplane 4.1.7 on a 3DR Pixhawk Mini. I’ve been experiencing a problem where the aircraft’s pitch diverges from the commanded pitch in auto mode. See the image below:
The plane failed to maintain altitude and the pilot had to switch into manual. In FBWA mode, the aircraft was able to fly and follow commands from the transmitter. What could be going wrong here? I’ve also attached the log file from the flight. Here is the log file: https://drive.google.com/file/d/1xcBAwffDVi1IlcWTf8NKso6Lbk-mrw4d/view?usp=sharing
The PID tuning looks suspect to me, because many of the pitch and roll values are the same. This is typically uncommon on planes so I would suggest working on the tuning of the PID loop.
While the plane is descending the FC is demanding a higher nose attitude, and it looks to me like it’s moving the servo in that direction as well. Since the tuning needs work it may not be responsive enough to the situation.
Verify that the C of G is correct. Given the descent, it may be a touch too far forward.
Set SERVO_AUTO_TRIM,1. This will get the servos trimmed for all flight modes, including manual.