How to activate the s-curve? I didn’t find information in the documentation.
If you are using Copter 4.3, S-Curve navigation is the default and can neither be activated nor deactivated via user preference.
2 Likes
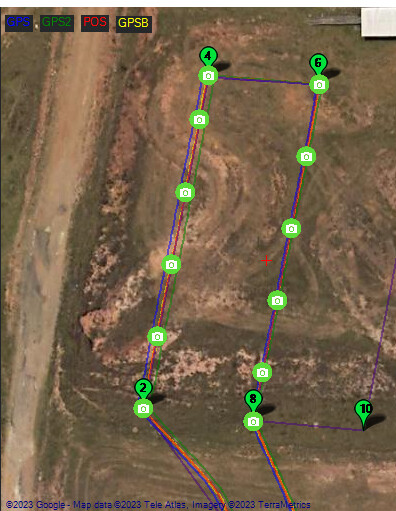
Hi Yuri, I updated my drone to 4.3.3, i did a new mission and the S-Curve didn’t work, the drone kept stopping to make the turns.

https://drive.google.com/file/d/1jIR_FEpVPP16LMJcGIouyWG_5UeCPeY5/view?usp=sharing
Those are pivot turns. It’s intentional behavior. What is it that you want?
What do you have WPNAV_RADIUS set to? Increase it if you want to to cut the corners.
This didn’t slow down at all:

But as Yuri asked not sure what your expectation is with S-curves here.
I want to do exactly what is in your print, that it makes a curve at the end of the line.
My WPNAV_RADIUS is set to 200, the drone always stops at the end of the straights. Do you recommend increasing the value?
I don’t recommend anything just realize what the action of a 2m radius will do. It needs to enter that zone before it will advance to the next waypoint. It will have to essentially stop to do that. Use the Simulator in Mission Planner and test some parameters values with test Missions and know what it will do before flying it.
I increased the WPNAV_RADIUS value to 800cm and the behavior didn’t change. The drone keeps stopping at the Waypoint and does not turn making the curve without stopping.
Does anyone have any tips on what it could be?
Here it is the log to download:
Remove the do_camera_trigger, they add a waypoint, and “disable” the s-curve
1 Like
I need that at each point of the image the servo is triggered, disabling the trigger will cause the servo not to be triggered?
This is the download link for the mission:
Ok, got it. Checked your params and you have Object avoidance enabled, OA will override s-curve nav, and requires the uav to reach the waypoint for evaluating the route to the next WP.
Diable OA and you will have s-curves…
3 Likes
Ah ok, I have to use obstacle avoidance. This way I won’t use the s-curve. thank you for the information.
Hello !
I have been facing the same issue i.e. my copter is stopping at each waypoint and then proceeding to the next waypoint ,but i want it to not to stop before every waypoint and continue to next wp by turning in the same speed
FYI my copter doesn’t have OA and also the WPNAV_RADIUS is set to 200
And yet it still stops at the waypoint and then turns to next waypoint
Please help me with this
Pleas send a .bin log from a mission (the mission file would be nice too).
I get that it would be helpful with the bin log
But sorry i dont have right now
I need to get it tomorrow
Can you please suggest some like what might be causing this ?
There is a lot of factors that come into play here - guessing the solution without a log is not that easy.