I’d like to understand what altitude accuracy to expect when in RTK float. At first I thought it would be cm-level but now I’m not sure. I am only interested in relative accuracy to my RTK base, which I set to 2m accuracy for quick takeoffs. Does the drone mostly use the barometer anyways?
I’m flying about 1 mile out from the coast and expect big air pressure changes out there which would make for unreliable barometric measurements for good altitude readings.
If you want AP to use GPS for altitude you need to change EK2_ALT_SOURCE to 2.
That being said do not expect cm accuracy when in float, actually it can be out meters in respect to when gps is in fix. Your best bet is to try to have gps in fixed when using it for precise altitude reference.
What gps is it? Why doesn’t go in fix?
If you need gps based altitude precision, throw Here3 and Here+ through the window and get an F9P based gps or fight with them to death and than buy an F9P.
It is not a specific problem with Here brand, it is just the single frequency used in 8 series chips inside them that works poorly in rtk. Their performance in RTK is so poor that i wonder why they still sell it as RTK capable.
So my research shows that the main sensor for altitude estimation is barometer by default. The only reason for changing over to GPS would be if first the GPS is really accurate, which this M8N-based HERE 3+ is not.
(https://ardupilot.org/copter/docs/parameters.html#ek2-alt-source)
which sensor to use as the primary altitude source
Change EK2_ALT_SOURCE = 2 : use GPS. Useful when GPS quality is very good and barometer drift could be a problem. For example if the vehicle will perform long distance missions with altitude changes of >100m.
I have been working with NEO 8 series for many years and cannot agree with your conclusion. The biggest issues are related to noise from the drone and vibrations. If you manage to shield you’re system against noise and vibrations you can achieve good results, fast and consistent RTK fixes with a 8 series chipset. If you do not manage even a 9 series chipset will produce inconsistent results.
If you are working within challenging environment (multipath etc.) the 9 series dual frequency solution might be the way to go. But otherwise single frequency short baseline is very well suited for the task.
Thanks for your input Tobias. I’m flying a custom US-made drone. Our configuration has yielded vibrations evident in the camera, so this could definitely be affecting our 8 series. I’ll have the manufacturer look into this further.
Show me a log of a flight of 15-20 minutes where an 8 series GPS stays fixed the all time and i’ll believe you. I have litterally almost 1000 logs of our copter in the most various scenario and it lost fix probably less than 10 times. From a performance point of view, 8 & 9 are night and day.
If someone needs an RTK that actually works without dealing with hocus pocus than F9 is the ONLY way to go.
It is not about believe nor hocus pocus.
Of course a dual frequency receiver with more constellations is more robust and more forgiving.
Anyhow, the series 8 chipsets did work for me for many years and I do not feel the need to update already existing devices. Of course the new ones will be series 9 chipsets and helical antennas - another factor which heavily influences the results.
But as mentioned before, I do not work within challenging environment (except for the windy conditions). I can place my base in an open field and start the drone with good satellite reception too.
If you work on challenging conditions the series 9 chipsets might provide the game changing difference. But if you have issues with the series 8 chipsets under non challenging conditions I would look into other issues before spending more money. If you upgrade later on the f9 will profit from the better environment anyhow.
It would be an option to look at a raw satellite log from the base and the rover (drone). There you can often clearly see what causes the issue.
We had the same bad experience with the 8 series and ended up going for the Septentrio, it’s pricey but now we get bullet proof fixed locks and cm level altitude readings.
Never tested septentrio but i guess is very very good. F9P at the moment i think has the best quality/price ratio. As i said, it relly depends if you are playing with the drone or working, if rtk is needed to work than M8 is worthless.
I’m not interested in youre insults but I’m interested to understand and fix the issue. Looking into the raw satellite logs from the base and the rover could help to understand why there is no fix and help others too.
Insults???
I am just stating the obvious, M8 is worthless if you need to work with an UAV with a trusty rtk fix. I asked you for a log of an m8 staying fixed for an entire flight, thats not an insult is just a curiosity i have.
We studied raw, we tested cors services as well as a stand alone base, all of this during 4 years trying to have an M8 to behave well. We never achieved, after YEARS, of fiddling the level of performance we needed (a solid fix troughout the flight). With an F9P module, you just connect it and go, it works great, stays always in fix.
I write it here again so that people do not throw their money away when they decide to buy a rtk capable gps, M8 is a waste of money and can cause big frustration with its poor rtk performances, if you NEED a well functioning rtk gps the ONLY way to go is an F9P based gps unit period.
Obviously there are more expensive, double frequency units out there that work great, i am just considering u-blox offer here.
I’m not talking about the log. I’m talking about your other writing. But forget it.
I have looked into the issue and I think the main thing might be that there are different products with series 8 chipset and that the Here module is a especially challenging one.
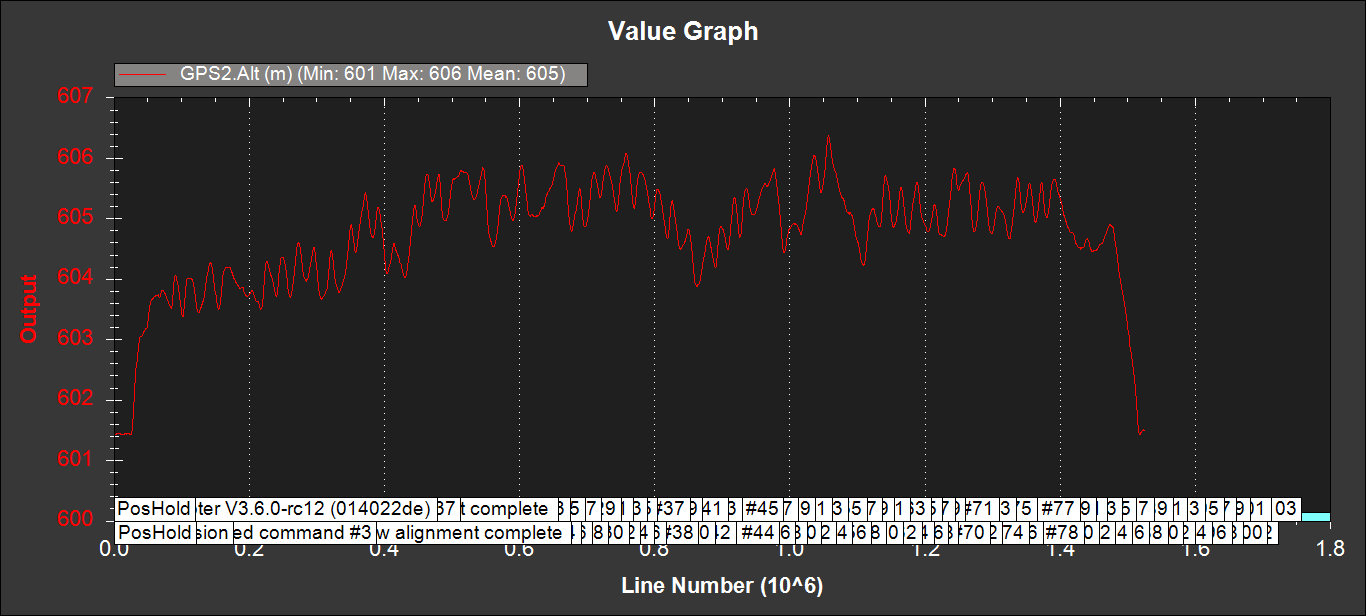
I still have a working m8t module from (first generation) EMLID and I use GPS, Galileo and Beidou. I upgraded the antenna to a helical one and fixed vibration and electric noise issues. Before that I had issues when flying in strong winds (vibration, antenna pitch combined with the directionality of the patch antenna), but I fixed that. I’m happy with the results and it provides data with cm accuracy. On the ground the fix is achieved within 20-30 seconds (PPK) and when using RTK for repeated missions the fix is ready after 3 or 5 minutes and is only sometimes lost during battery changes on the ground when the reception is blocked by the operator (I do hot swapping). The baseline is less than 1,000 m. That is a solution which is 7 years old an ist still working well.
Of course I would also recommend a F9P module if you are buying a new one and can afford it (the price difference is worth it, no question and it is not worth to save money here). I do not disagree with that, I only prefere a less extreme position.
The only point I want to make is, if you already have bought a series 8 chipset and have the time I would look into the configuration (I found some discussions in the forum) and fix vibration and noise issues before throwing it into the bin. It should be able to hold a fix most of the time and if you’re application can accept some losses it might be ok.
First of all Emlid reach uses rtklib and not the software in the chip itself to calculate rtk, it is a completely different game. That being said i have had reach too and it may work a bit better than an M8N chip alone but still far away from ideal. As stated before if you need RTK to work with and to be trustable, M8 chip is not a viable solution.
As already asked, if you have a log where the emlid stays fixed troughout the entire flight i am more than willing to take a look at it.
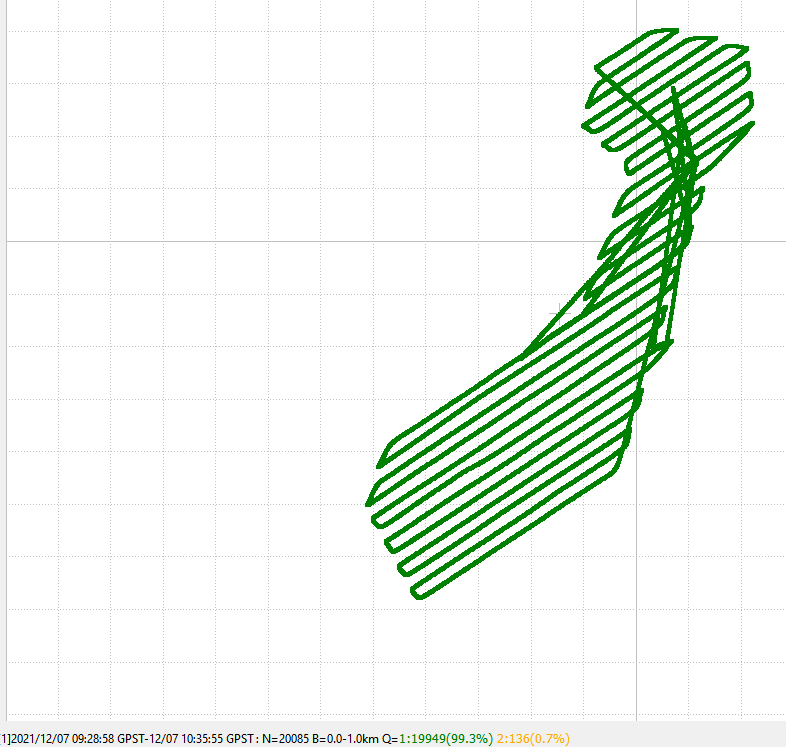
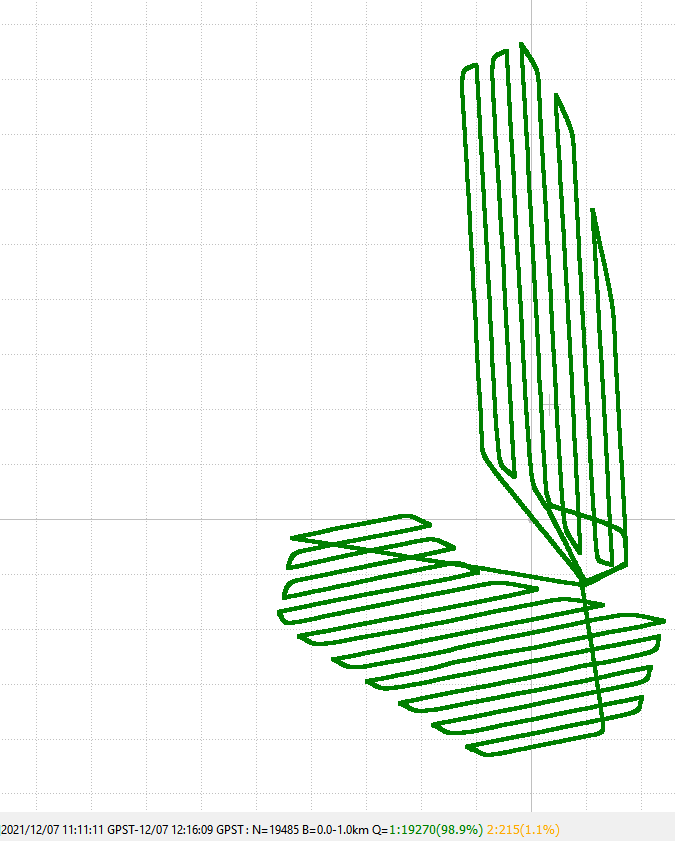
This is PPK (kinematic/continous) but very windy conditions. On RTK flights before I improved the vibration situation I have not had significant differences between the PPK and RTK results.
 difference. But if you have issues with the series 8 chipsets under non challenging conditions I would look into other issues before spending more money. If you upgrade later on the f9 will profit from the better environment anyhow.
difference. But if you have issues with the series 8 chipsets under non challenging conditions I would look into other issues before spending more money. If you upgrade later on the f9 will profit from the better environment anyhow.