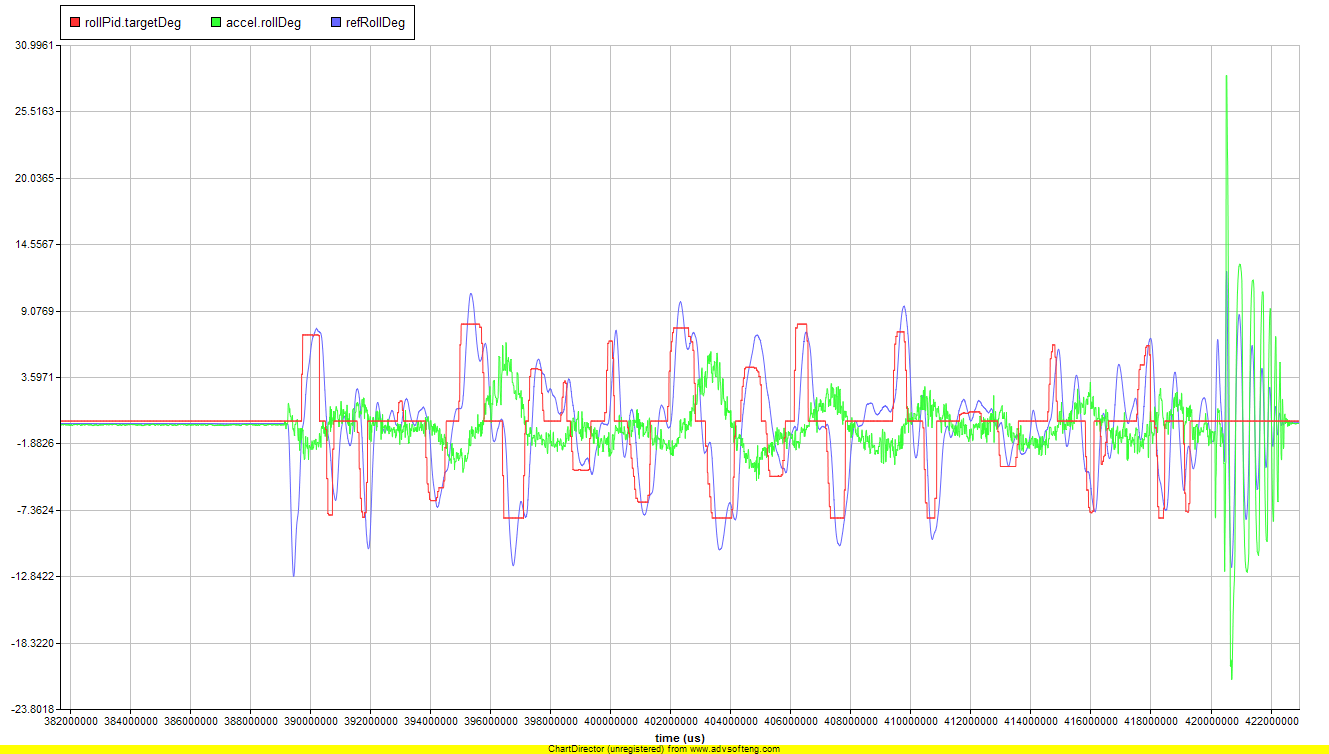
Hi. I do my own quadcopter project based on the arduino for education purposes. I have implemented a complimentary filter. My drone flies good. But I have noticed one thing which I can’t understand. When I rotate my drone in hands the complementary filter pitch/roll lines on the chart pass through pitch/roll calculated by accelerometer. But at flight time pitch/roll calculated by accelerometer has a lag. What causes this lag? Can it be caused by linear acceleration?