Loaded the 3.4rc-1 today on my MQ600 Quad with a Pixhawk on board, and got 5 flights with no issues. I did no calibrations or other setup from previous 3.3.3 software for the first flight. First 2 flights in calm wind, flight 3 in 10~15 Mph wind with greater gusts as a front was rolling in. 4&5 in light breeze.
Flight 1:
Take off , fly and land in Stab=OK
Take off fly and land in At Hold = OK
Takeoff, fly and land in Loiter = OK, Did notice some toilet bowl, and redid compass cal before 2nd flight. This may have been due to a remounting of the telemetry TX that I made prior to the first flight with this software. 2nd flight after Cal was with no further issues.
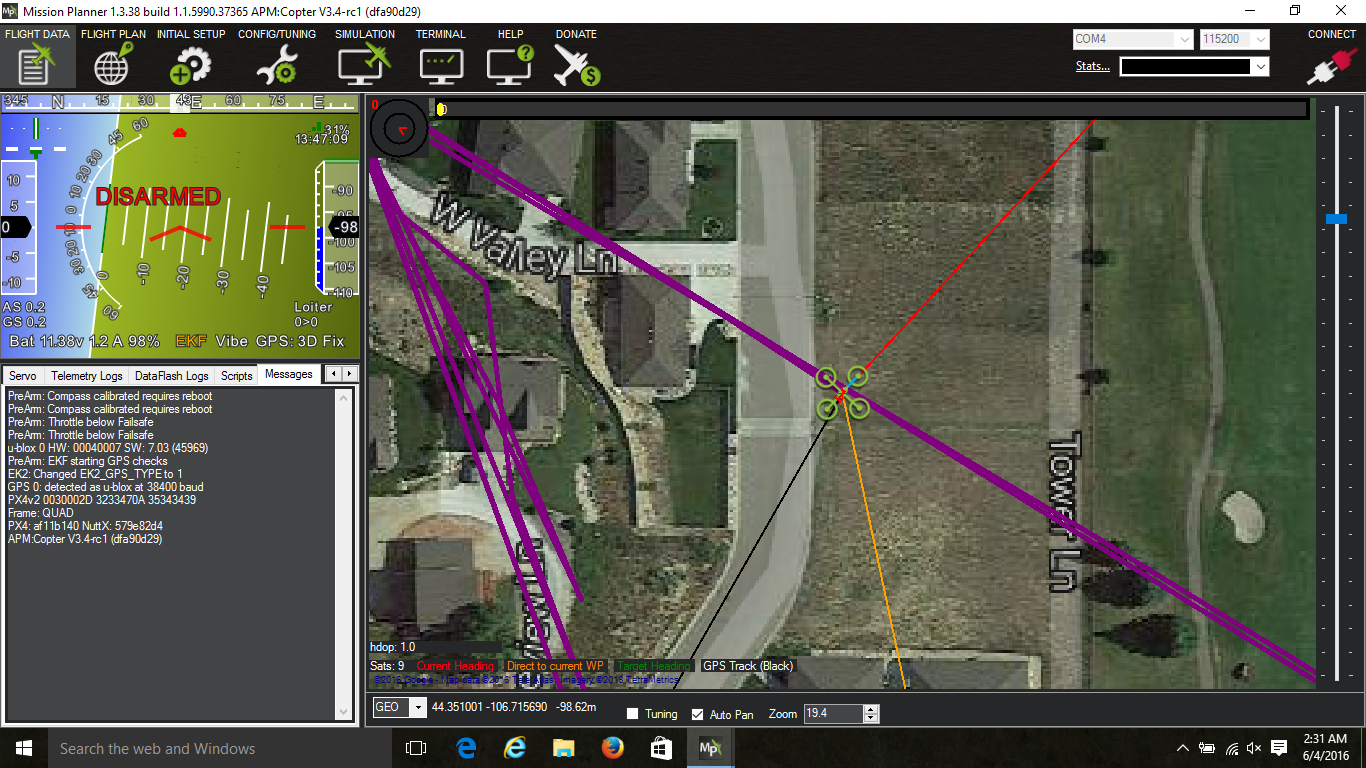
Circle mode, made 4 turns = OK- MP replay looked like a compass was used to draw the flight path on the screen !
Flight 2:
Auto 6 way point Mission with RTL = OK, landing within 2-3 feet from takeoff spot.
Manually triggered RTL from 30feet altitude and from 150 feet = OK
Low Battery warning with RTL = OK.
Flight3:
PosHold = OK
Fence = OK, triggered on altitude 2 different times. Set in MP at 150 feet, triggered at 163 feet both times. = OK, but noticed a bit of a sudden drop as transition to lower altitude as RTL was triggered, pretty much the same behavior on prior version of the software. Also saw a “Compass Variance” message which cleared after about 5 seconds after the RTL kicked-in.
Flight 4 & 5 , just flew a lot in Alt Hold & Loiter with Mobious camera installed, no issues.
Machine seemed way more snappy to control inputs in Stab and Alt Hold, with this version. I may need to lower RC Feel on this version, currently at 50%, but so far it’s been a great flying experiance. It was perfectly stable in the gusty weather with no surprises.
I hope to do more flight mode testing later this evening if the weather cooperates.
Great job and a big Thank You to all who developed this.
Questions:
On startup after the before the second flight( after the Compass Cal) I heard "Change EKF GPS Type to 1 " message in MP, what is this? Didn’t occur on flights after that first reboot after Cal.
Is it safe to try this on my PixRacer which is doing fine on the 3.3.4. software?
Thanks again for all the work into this release.
Joe
 ]
]