Can someone take a look at my crash log? Much appreciated!
Mission Planner Auto Analysis
Size (kb) 1915.958984375
No of lines 24392
Duration 0:02:54
Vehicletype ArduCopter
Firmware Version V3.7.0-dev
Firmware Hash 24dbc67b
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - FAIL: Large compass offset params (X:-849.29, Y:-120.60, Z:376.07)
FAIL: Large compass offset in MAG data (X:-849.00, Y:-120.00, Z:376.00)
Moderate change in mag_field (33.69%)
Max mag field length (698.91) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: GPS_GLITCH
Test: GPS = UNKNOWN - join() takes exactly one argument (2 given)
Test: IMU Mismatch = NA -
Test: Motor Balance = GOOD - Motor channel averages = [1225, 1202, 1221, 1271]
Average motor output = 1229
Difference between min and max motor averages = 69
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
00000033.BIN (924 KB)
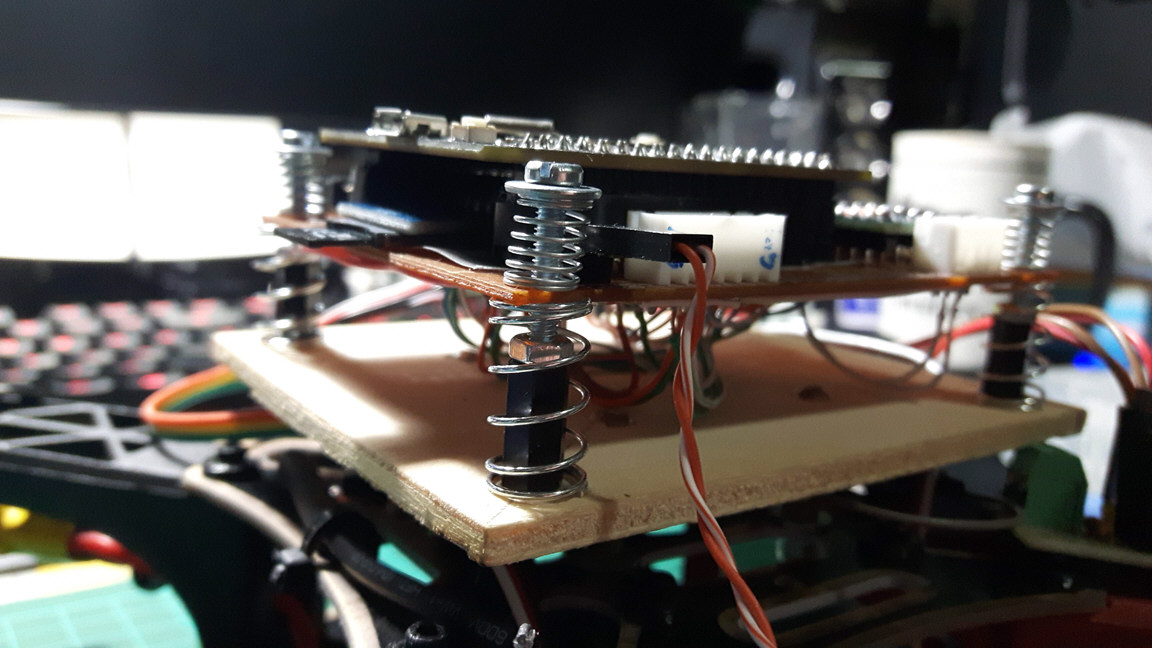
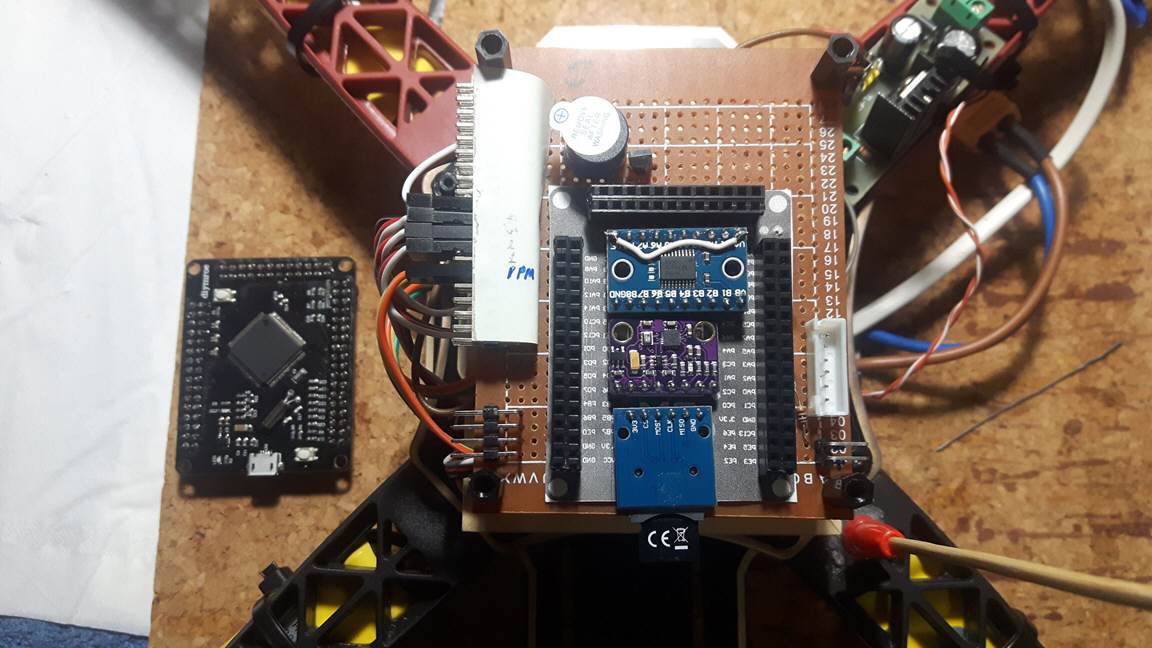
My Flight controller is custom DIY:
stm32f407vg board (not discovery, a simpler version)
mpu9250+bmp280 accel/gyro/magnet/baro (MPU9250-BMP280-10DOF)
microSD
NEO-M8N gps (NEO-M8N-GPS-Module)
Wemos D1 mini pro (running ESPMavLink - esp8266-telemetry)
The custom hwdef.dat can be found here: RossosHEX/ardupilot/stm32f407vg
Parameters: 00000033.param (13.7 KB)
The rest of the quadcopter hardware is described here:
https://www.rcgroups.com/forums/showthread.php?3086792
Something you can spot more irregular than usual?
Some of my initial thoughts included some wind, because the drone did some flips when falling.
However none of the fall is recorded in the log.
Which could mean that the flight controller simply stopped working somewhere in the air.
The ESCs were beeping after crash, thus I presume they did have power, but lost signal from the flight controller.
The flight controller itself got dismounted from the frame, so it’s hard to tell if the power pins got pulled out during flight or when crashed.
I am using L7805CV as a 5V regulator. It is able to output 1A. MPU+Baro, Wemos and GPS draw power directly from the regulator, the microSD takes the 3v3 from the microcontroller 3v3 regulator. Is it possible I overlooked the power consumption of all the modules, including the flight controller?
Google Earth
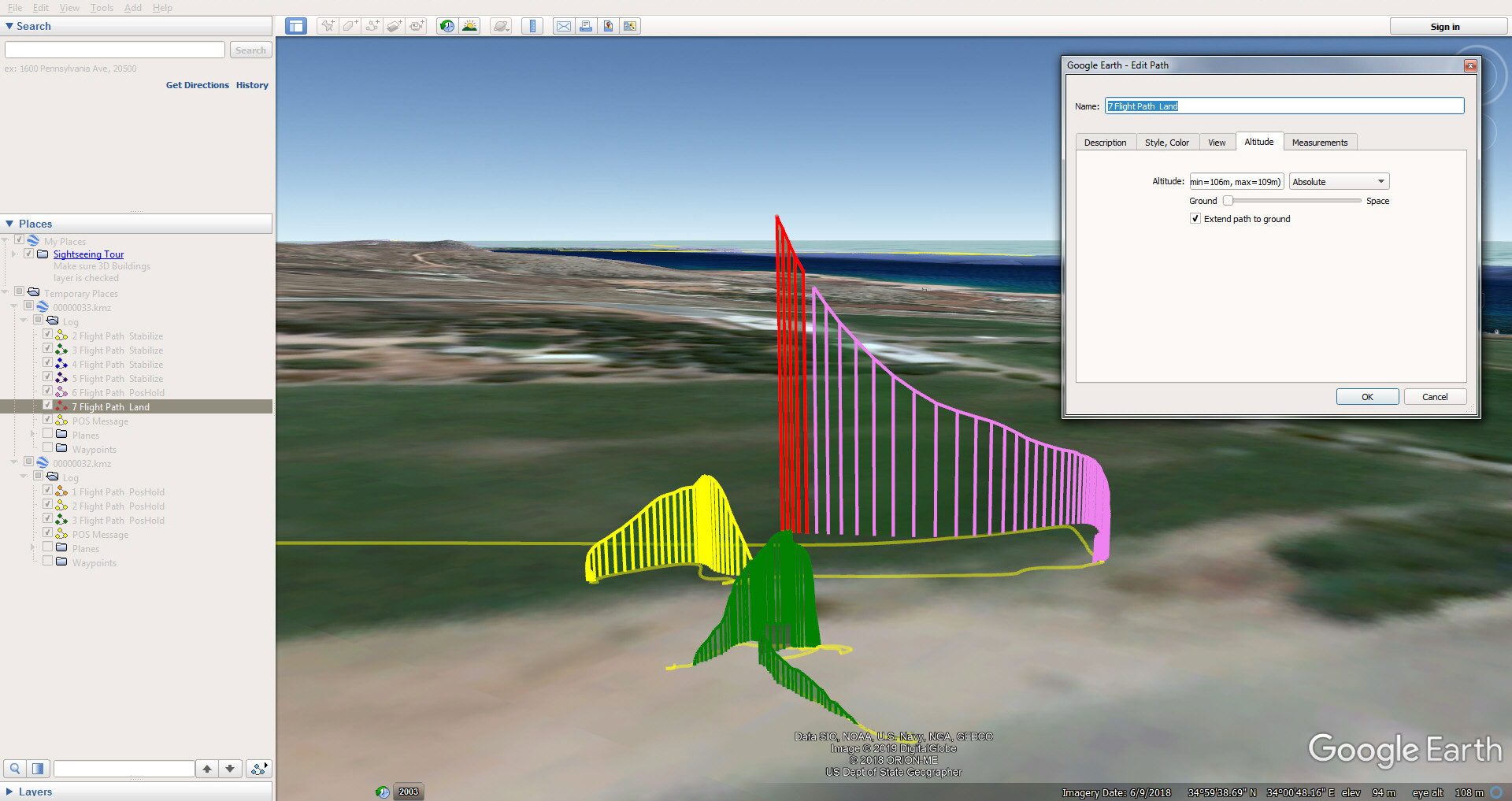
For reference