A customer had a strange crash during Survey flight, without any error message, the copter goes down.
2 Problems here I would like to mention, for some reason, the Taranis X9E didn´t show any telemetry, the customer sill flew the copter, which is a big no go. He than used the laptop for the Telemetry. The other thing, the customer didn´t go back to Loiter or Althold, after the problem occured, would be interesting to know, how the copter would handeled this.
The copter itself flew many hours before, without any kind of problems.
I would greatly appricaite if someone else could have a look at the logfiles, maybe I missed something.
So according to this, you’re using Copter V3.5-dev which is quite old and not an official 3.5 release. Not saying that’s a cause, just pointing it out.
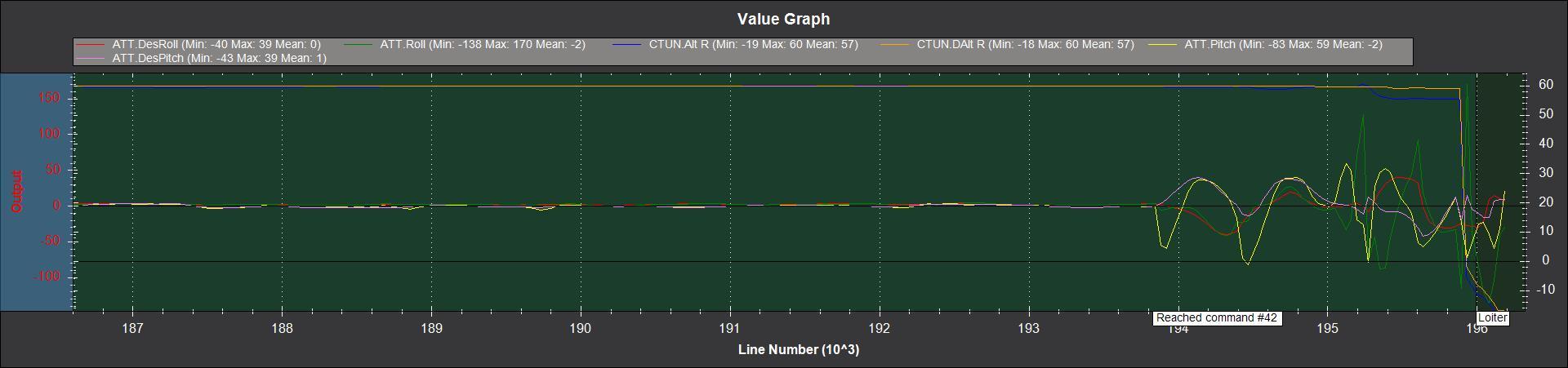
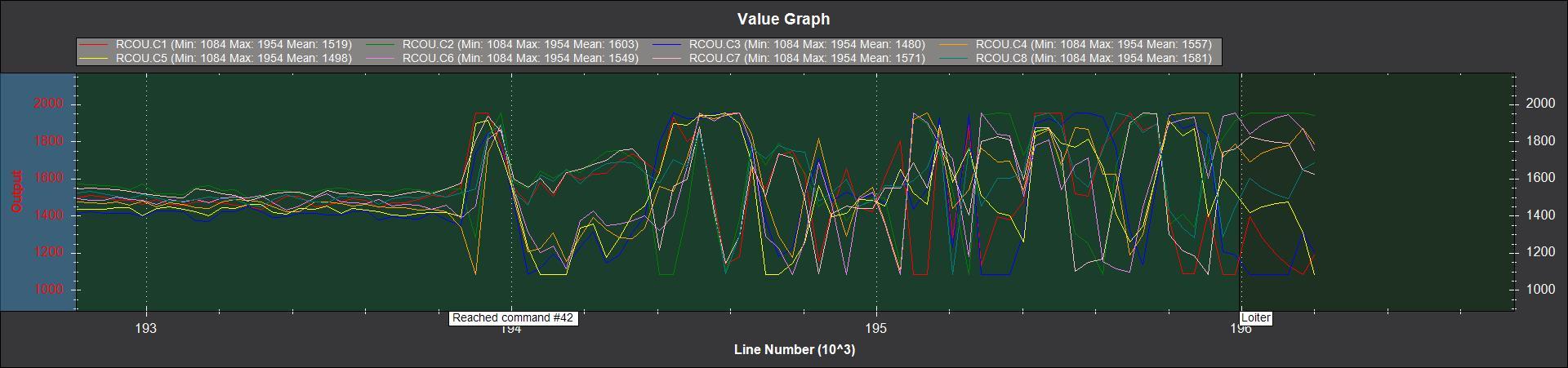
The log appears to indicate a major mechanical failure. As soon as it hit mission command #42, it began to tumble. All motor outputs where hitting their limits and clearly beyond recovery. I always thought an octo was pretty stable with the loss of a motor though? The battery is fine. Nothing else seems to be out of the ordinary. I think someone with more experience with octos will need to pipe in.
thx for the fast reply, I hope to have the copter back this week, to check, where the problem could be. So far, we have used the parts on this copter for at least a year, without any problems, but you never know…
looks like very bad, or multiple problems.Shortly after very bad pitch deviance , rights after After 1070seconds into the flight, it flew “fine” for 2,5sec , then all started to fell apart.
You have lots of sensor clipping, then that went thru the roof after the incident.
There are also some slow loops in the performance logs, But given their position, it’s hard to believe they are the cause, rather than consequence of other circumstances.
Finally, I don’t remember anymore how much of that (MaxT) is “common” during such conditions (clipping/vibrations) on such old firmware.
I thought the same thing too with the redundancy.
I had a hex with a single motor failure.
However, it was the stationary part of the motor internals that started to spin and the motor wires were pulled inside the motor.
When this happened, the ESC was sending back screwy data to the FC and the craft went down gently performing a 360°/sec spin until it crashed.
Although this is an non-standard version of AC3.5, I agree with Matt’s analysis that there was some kind of major mechanical issue. It’s hard to say what it was but the vehicle initially pitches forward to about 60deg before recovering, then does it again (and again recovers) and the it pretty much completely loses attitude control pitching back and rolling over a few times.
The front right motors all go to full so it’s trying to stop the pitch correctly.
We don’t have feedback from the motors to know whether they were actually spinning and producing thrust so it’s hard to say more precisely what happened.