Yesterday after a rather perfect mission flight, my current build did a very hard landing which broke a few things. It was in normal landing mode and suddenly came down very fast. I have done my own log analysis and my working theory so far is that a GPS glitch led the EKF to failsafe and invoke an emergency landing. LAND_SPEED_HIGH was set to 0 and WPNAV_SPEED_DN to 150 which is somewhat consistent with the “crash” speed I saw. I would be grateful for a second opinion on that analysis.
The other question is how do I avoid those kind of issues in the future. I’m using an uBlox M8N which gives pretty good accuracy. Sky was clear and I was flying in an open area. I see no possible reason for a GPS glitch. Is it possible to “turn down the sensitivity” of the glitch detection?
I think you have a different problem. You just have bad GPS reception. My problem was a crash landing because of the EKF failsafe. Please don’t hijack threads.
@StefanG I’ve look at your log and I think that EKF Fs and GPS glitch are not the cause of the crash but the effect. For me it is looks that errors appeared after a ground hit.
Unfortunately I cannot say for sure what was the reason. It is clear that FC wanted to stop the descending, but it didn’t stopped.
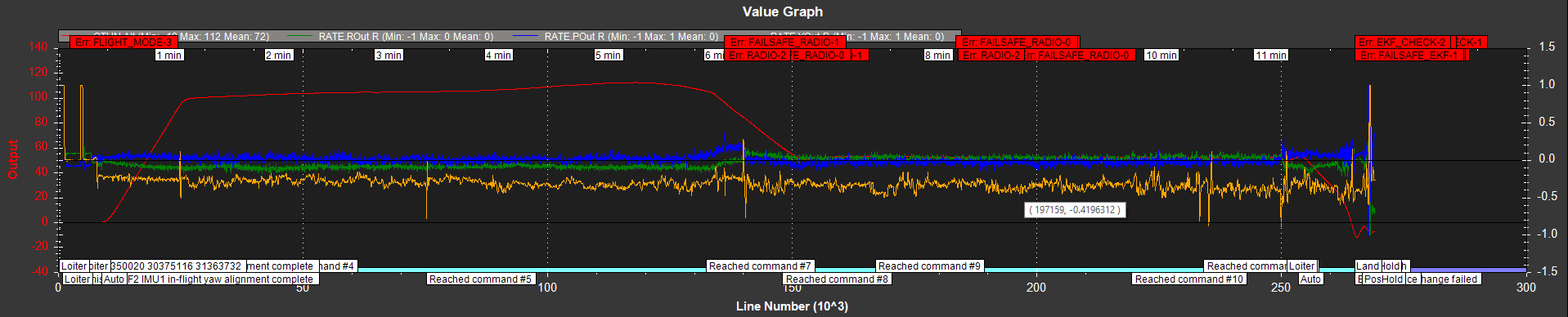
Two of your motors got maximum throttle while descending, and another two keep relatively lower values.
This may be related to a overweight + bad frame balance + possible motor desync.
Thanks for the input! I think you actually might be right. I reviewed the video and it appears so that the copter suddenly descended fast, hit the ground and after that, the glitch tone was played. After it hit the ground, it gained altitude again… very weird. Maybe I go back to the 17.5" props… For this flight I changed to 15.5 for testing efficiency. In the long run I might have to look into other motors. Seems that I’m running the Multistar 4822-390kV at the upper end of it’s performance range…
Indicated voltage at start was >17 volt, , yet hover voltage is more likely to be a 4s pack, so the voltage is not properly calibrated.
few minutes before the descend, you were at 68% throttle demand just to maintain altitude, then just before the throttle demand goes to 100% , you had 68% throttle demand while sinking.
Your CW motors are working harder thru the flight, effectively reducing the thrust reserves. (CCW cannot go that high while maintaining yaw )
Descending with that little power left brought it into VRS , and sink rate increased until crash.
You can see that the current/power do not increase when the throttle demand goes from 70…100% . -
together, the motors could provide more thrust, but the CW motors were at max, making it impossible.
As Sergey and Andre already mentioned, your mechanics need to be checked. Specifically, your motor alignment. The copter has a significant right yaw tendency, so the flight controller is constantly commanding a left yaw:
This is the imbalance that caused motors 3 and 4 to be nearly maxed out during the entire flight. Eventually, the voltage got low enough that they could no longer achieve the required counter-torque and maintain altitude at the same time.