Hello all !
I’ve recently set up a new custom X4 frame with these specs :
-
700mm
-
15’5 carbon prop
-
T-motor anti-gravity 4006 300KV
-
ESC Hobbywing 40A
-
Battery multistar 6S 10C 6600 mAh (also ran with 5200 mAh)
-
Total weight around 3 kg.
-
Px4pilot from HK… (http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idproduct=99193)
(first time I used this one, already used HKPilot32, 3DR Pixhawk, PixFalcon without issues)
I have an important issue with my setup I can’t find the reason… first time I’ve seen this happen.
In STAB mode, when I try to hover, my copter rapidly starts spinning CCW and loose altitude even if I try to correct with manual yaw / throttle input ! There are no Roll / Pitch deviation and the copter keeps its attitude right. Just a Yaw spin making him fall to the ground.
I checked the logs of multiple flights. I can’t fly more than 10-20 sec anyway so I did a lot of test flight at 1-3m height to prevent damages.
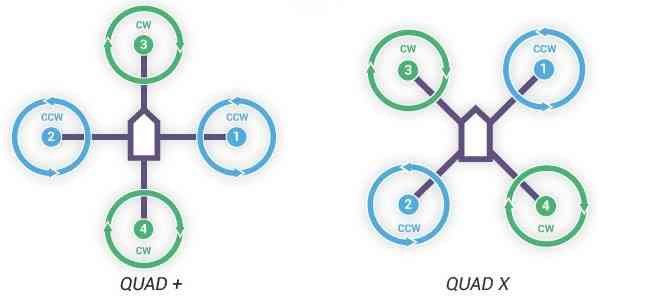
We can see that the AP is reducing motors 1 & 2 (CCW) while increasing motors 3 & 4 (CW) to correct the yaw spin… but it should do the opposite ? CW motors generate CCW torque ? am I wrong ?
Anyway, since copter prioritizes attitude over throttle input… motors 3&4 go to max and 1&2 decrease a lot so the average is below the hover position and copter falls slowly to the ground.
I’ve checked the motors layout and spinning direction, MAG/IMU/AHRS datas looks good, when i spin left/right pitch up/down , roll left/right, I can see it’s working as it should on the mission planner HUD.
ESC calibration was done and re-done.
I tried to check if it could be a battery power failure but Vcc and battery voltage don’t drop that much and I don’t know why it would always spin CCW…
CoG of the copter in a 3-4 cm behind the CoT. Autopilot is on top of the CoT.
Copter is symmetrical on the roll axis. Motors are not twisted more than the eye can see (1-3° max).
I uploaded 2 logs from two differents days… Hope you can find something I missed !
(Sometimes I let the copter on the ground with 20-40% throttle and gave so yaw/roll/pitch input so verify the system and to test the battery on 20+ sec flight as I suspected a power failure at first…)
1st day of flight : https://ufile.io/9df17
2nd day of flight : (Big file sorry, I logged ALL data…) : https://ufile.io/2869f
Thanks a lot !!