The continuous warning during normal flight does not seem to affect the flight, and GPS positioning is normal. Can I turn off or lower the warning level? May I ask how to set it up?
Unhealthy GPS error may actually mean that you have a compass issue. Later versions of the firmware have improved the warnings. Post a .bin file of a flight with the warning and somebody may be able to suggest some fixes.
1 Like
Which means that the current firmware compass malfunction may prompt with Unhealthy GPS Signal?Is it not a warning caused by GPS satellite signals?
I don’t have a cloud drive and cannot upload a bin file of a flight
You could try turning on a geofence. (a suggested practice anyway). This will prevent arming until the GPS has satisfactory information. It will be frustrating the first time, or if you are trying to test indoors, however it will prevent issues down the road. If you are seeing GPS information (satellite count, and HDOP) then the GPS is working, it just may not be working well enough. Test in an open area with no buildings or obstructions to be sure.
Can I change the minimum HDOP quality level to eliminate warnings?
Yes, but I don’t recommend it.
https://ardupilot.org/copter/docs/parameters.html#gps-hdop-good-gps-hdop-good
The parameter is GPS_HDOP_GOOD. The default is 140 (1.4 HDOP) A lower value is more strict or better GPS positioning.
But again, I wouldn’t raise the value to ignore the error. It’s better to find the cause of the error. Find a cloud service that will allow you to post a .bin log.
Thank you for the reminder… I’ll think of another way
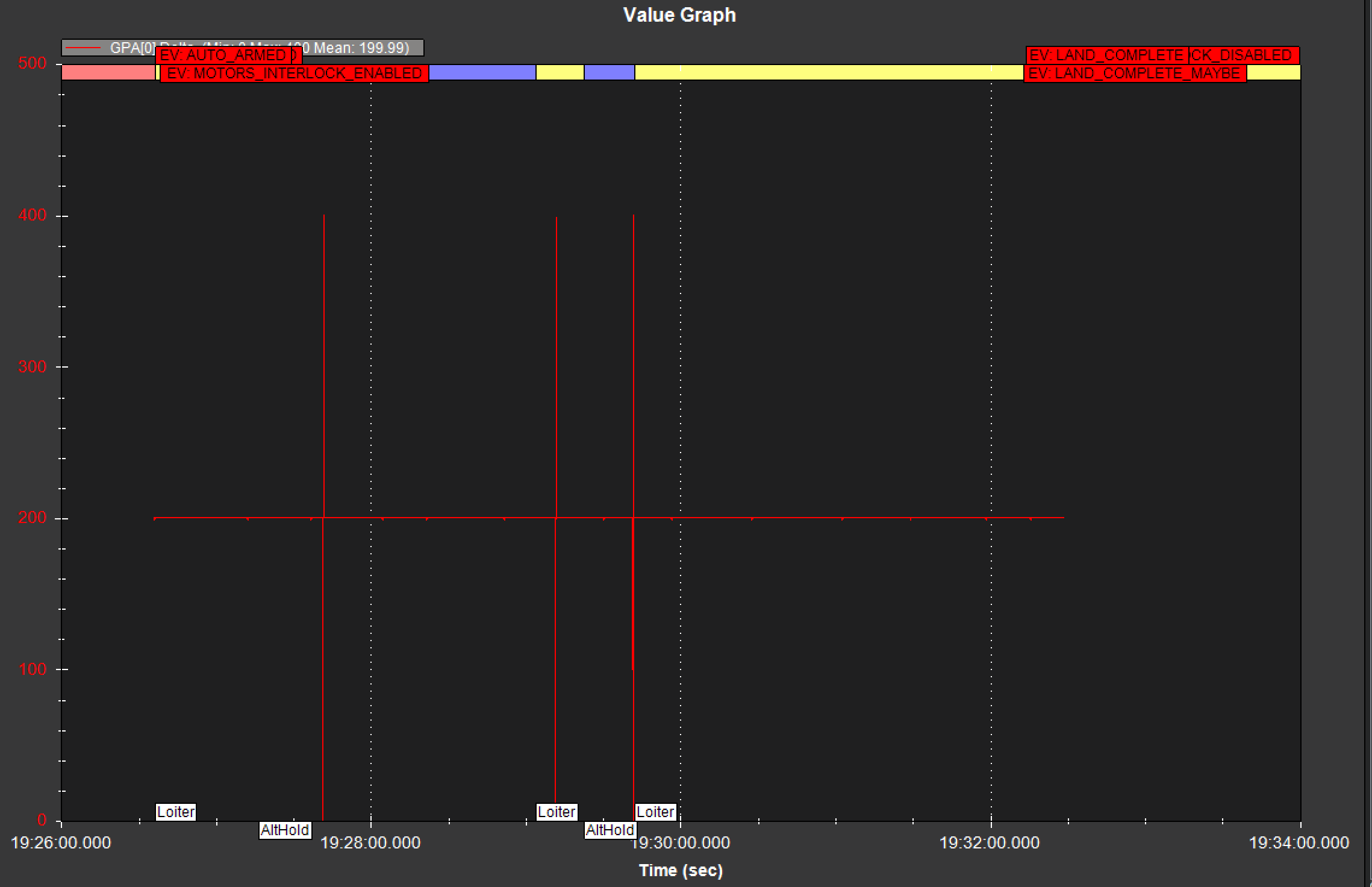
Hi @Allister, I have also noticed few GPS Unhealthy Issue warning before arming and when I checked the GPA.DELTA it looks like this:
But there was no warning or issue during the flight. Is it related to power or something else?
Here is the flight log for your reference: 2024-04-07 19-26-36.bin - Google Drive
Thanks!
@scientist_bala, if you zoom in your graph you can see that on the spikes first the delta drops to 0 [ms] than rises to 400 [ms]. I think this shows that there are no packets lost but the sequence is lagging in the loop.
Is it correct that you have to GPS working. This GPA.Delta is only on GPS 0 but not on GPS 1. And also GPs 0 is getting much more satellites as GPS 1.
Maybe you can reduce the workload only by selecting the best GNSS system at your place.
1 Like
I would agree with @Juergen-Fahlbusch . Try tinkering with GPS_GNSS_MODE. 5 and 65 seem to be common choices that work for people.
1 Like
Hi @Juergen-Fahlbusch, It is good to see your response.
Can you please little explain to me more? if this is the case then it might be the issue from the CUAV side.
Yes! the GPS is working and there is no issue or warning reported by the Ardupilot.
Yes! both GPS are different. GPS1 is CUAV 2HP and GPS2 is M8N (For redundancy)
Thanks @Allister, I have already set the GPS_GNSS_MODE to 65 for both the GPS.
@scientist_bala the reason why some telegramms from GPS to FC arevlagging I can’t say as I don’t know in detail how the measurement algorithm on FC side is working. Only I can see from your log file that this ias only happen on GPS 0. But just from that measurement it seems that no packets are lost only the sequenz is lagging sometime as it show first 0ms delay and than direct 400ms which is in middle again 200ms.
But again I don’t know the algorithm behind.
Did I asked you before in which area of the world you are staying.
I recommend not to use GLONASS system at this time. All GNSS systems can be manipulated by the operators.
1 Like
The fact that you’re seeing this on the first GPS (CAN device) lead me to think it might be something related to the protocol. Have you checked if the unit is updated to the last fw provided by the manufacturer?
Edit: you could possibly try setting it up with serial connection instead, see if the behavior is different (C-RTK2 HP Heading and RTK Module — Plane documentation)
same issue here, funny thing is that error appears like 2-5 minutes after boot, if i get 3d fix and take off before everthing is normal, i could fly without problems, and the strange thing is that i was runing a old firmware when the issue appears, i was flying for a long time with the old firmware without issues, i updated the firmware and the same problem, i will try replacing the pix 6c for a 6x and see if the problems persist, recently one of my esc burn before the issue, maybe the fc or the gps is damaged.