We are about to fly a new YANGDA FW320 VTOL drone. We received a .BIN log file from its flight test by the manufacturer as well as have the full parameter list which I set based on our operational requirements here.
It would be much appreciated if you could take a look at the flight log as well as at the current parameters (I have adjusted quite a few things so they are different than during that log) and help us asses if this drone is safe to fly / are there any “red flags” (or even “yellow flags” ) hiding in the parameters or logs. Thanks!
(On account of your previous help with this drone, it would be particularly helpful if @Yuri_Rage , @Kofi_Yeboah_Koranten or @tridge could take a look! Thanks )
I’ll keep my comments mostly related to GPS rather than taking responsibility for giving you a green light to fly your expensive, very nice, new VTOL.
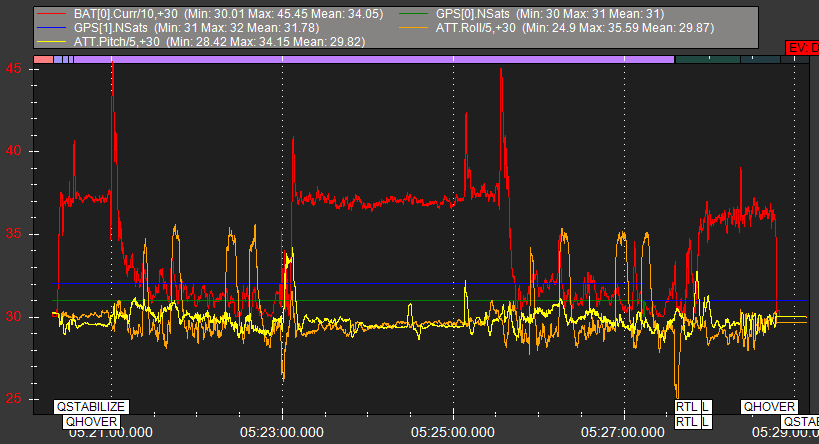
A graph of (scaled) current, pitch, and roll against satellite count looks excellent. I see no hint of the problem you experienced before, at least in this single sample.
I’m not a seasoned Plane user, so please take these comments with a slight grain of salt…
Z axis vibrations seem a bit high. There’s no clipping, but the magnitudes are above what I’d want to see overall. It’s possible this is unavoidable due to the way the props pass over the frame, but take a close look at anything that could be contributing (often loosely routed wires or poorly secured components).
EKF appears pretty healthy overall with no innovation figures that are alarming (at least to my eyes).
The tune appears a bit conservative, which is probably appropriate for this stage and may be perfectly adequate, depending on your perception of its control and responsiveness.
Highly recommend a second/third opinion in case I’m missing anything, and also a more trained eye to have a look at the parameter list and failsafes.
For something of this size and expense, I’d definitely seek some preflight advice from @tridge.
Just conducted some successful hover tests. Everything behaved great in QLOITER / QHOVER (and QLAND). The logs for that are here.
Any feedback on improving the drone operation would be much appreciated. It would also be amazing if you can see if there are any early warnings / “eyebrow raising” things in the logs that imply some problems or added risks. Thanks!
@dkemxr and @xfacta, can you take a look at the logs in this topic and see if there are any red flags I’m missing? You’re both far more experienced at spotting them than I!
I did notice much improved vibration levels on Jan’s most recent flight than in the manufacturer provided one.
Thrust/weight looks good, outputs look good and vib levels look good. There isn’t much Pitch/Roll in that log to check tuning but I think it could use a Quicktune. But before that configure the notch filter. For that set these parameters and do another short hover flight:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
What size props?
Note: One thing I’ll admit to not understanding is why the default ratio of the Acceleration Vertical Controller I/P gain is 1/0.3 and on Multirotors it’s 1/0.5
Q_P_ACCZ_I,1
Q_P_ACCZ_P,0.3
Not that there is an output oscillation problem here which is what this often addresses, I just don’t know the logic behind the difference in platforms.
We just completed some successful flights today, including a 10 km AUTO mission as well as some AUTO missions with a 2kg payload and simulated delivery.
It would be much appreciated if you could take a look at the logs and see if everything is looking fine! Something that we immediately noticed during the flights is that in the AUTO mission there is a 40m altitude drop after the second transition from VTOL to fixed-wing (before a descent for a delivery), despite there being no problems with the first transition (after VTOL takeoff).
It would be helpful if you could help me explain why that altitude drop is happening after that second transition and what could be done to fix it. Thanks!