Finally, I ran the position hold mode.
It was very stable at first, but after a certain amount of time, the helicopter began to spin around with its head fixed in place.
I always want to make a stable helicopter like DJI’s phantom.
In this unstable position hold mode, what parameters can I modify to fix this?
Or should I run the compass calibration again?
Please use the traditional helicopter tuning wiki found here. Hopefully that is what you are referring to when you mentioned that you found the blog. Please post a param file for your current configuration. that will help me give you advice.
When the desired and actual don’t line up with each other, it means that you either don’t have enough I gain (ATC_RAT_XXX_I) or the leak min parameter (ATC_RAT_XXX_ILMI) is not large enough. typically the ATC_RAT_XXX_I is about the same magnitude as ATC_RAT_XXX_VFF. the ATC_RAT_XXX_ILMI parameter should be between 0.05 and 0.1. that should make the actual value track the desired value more closely.
Please post a param file and we can go from there.
@Ricoman since you have not done any tuning yet, with Copter 3.6 we have had good results in most helicopters by using the default parameter files you can load. For Mission Planner it is this file.
These params can simply be loaded from the frame params dropdown in Mission Planner setup. They provide a miminal ILMI value and the tail tuning may be a bit too sensitive. For a 700 class helicopter otherwise they should provide the correct tuning that will achieve good attitude tracking, and good high-speed flight characteristics.
It is horizontal.
When the spooling up starts, the level of the swash plate is broken as the servo moves.
If i disarm, it will return to its original state.
@Ricoman did this start to happen after you finished the PID tuning? It is possible that you have nonzero ILMI and there is integrator buildup due to either aircraft attitude or a pilot input. The only reason I say this is the integrator is turned on and off in the same manner that you describe for the swashplate behavior. I think it is best if we see a log to ensure it isn’t something else.
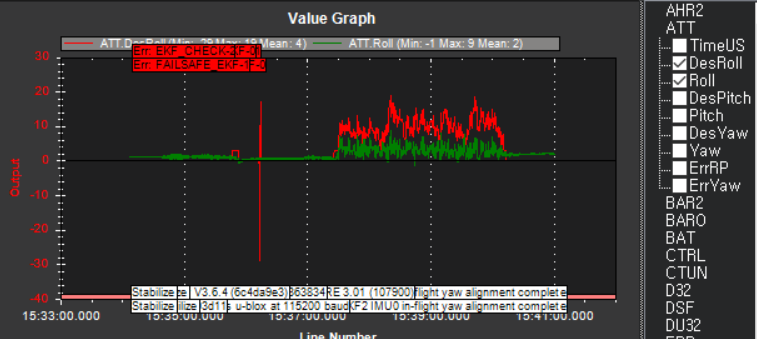
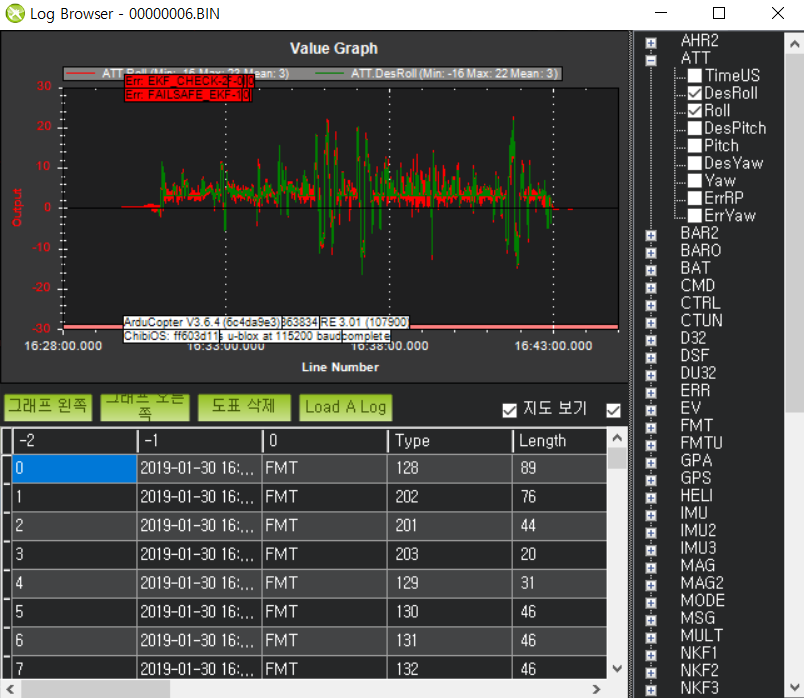
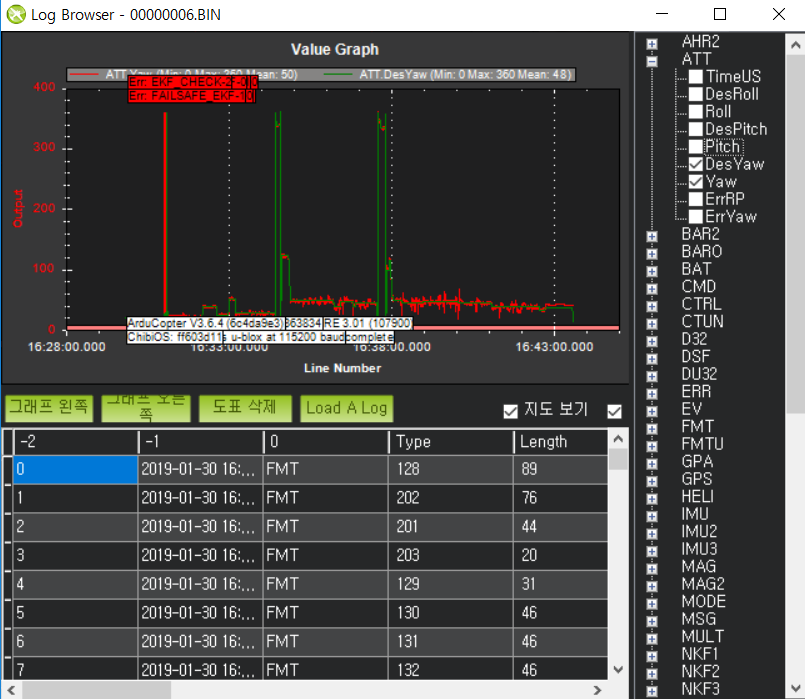
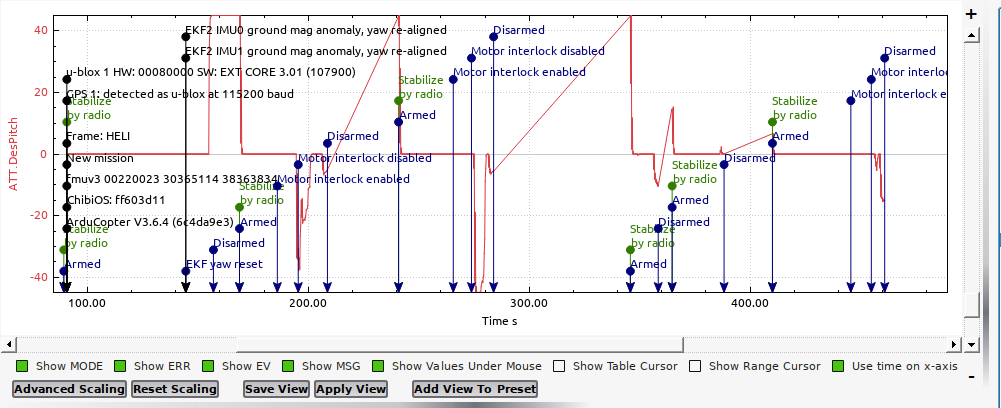
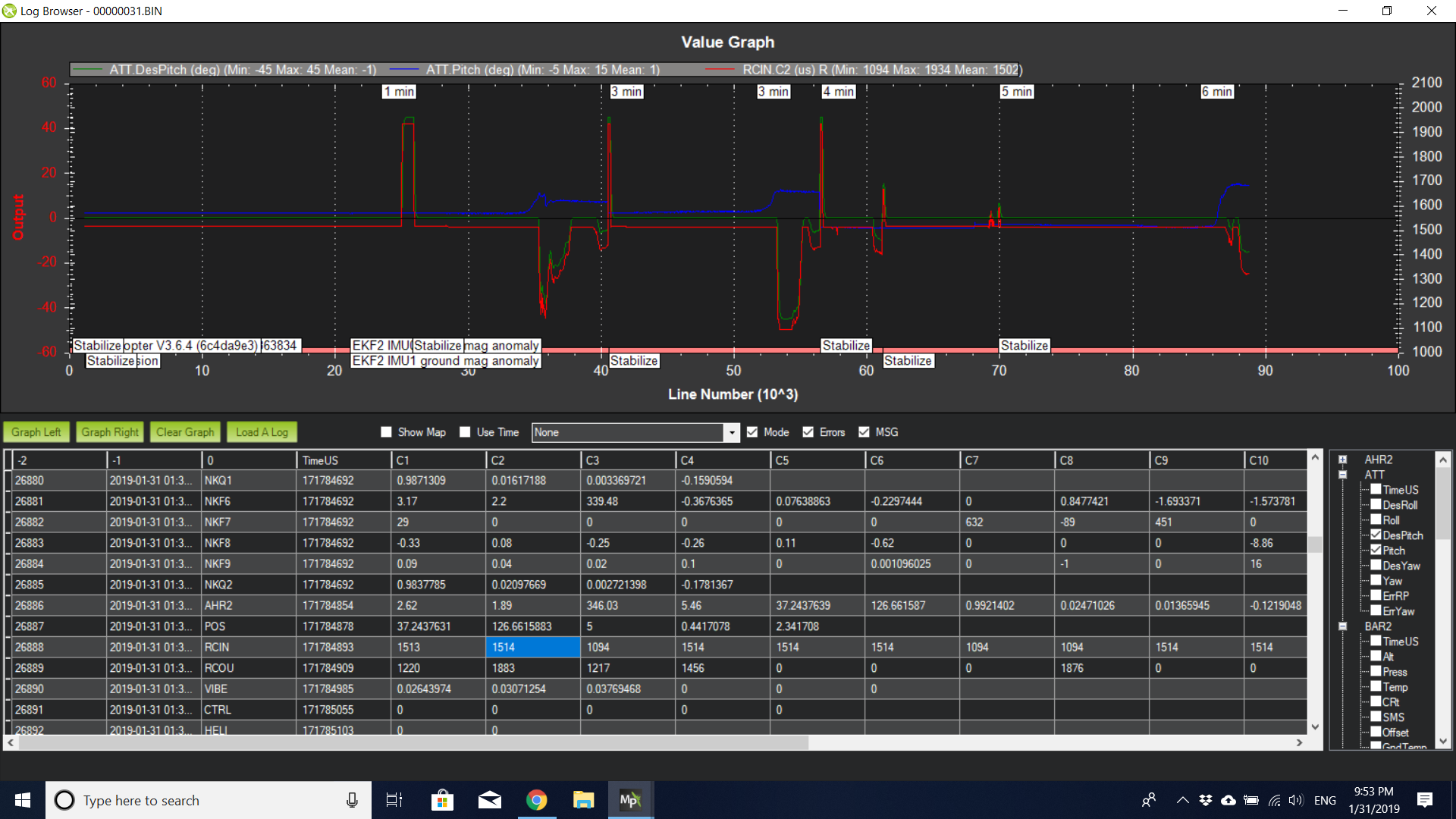
@bnsgeyer it appears to me that the desired pitch attitude is changing by up to 45 degrees when armed or disarmed, and drifting some otherwise. And why it’s doing that is not readily apparent to me.
Everytime he displaces his stick it the desired pitch moves as well
The swashplate movement appears normal to me especially with PIT_I and RLL_I near 0.6 and PIT_ILMI and RLL_ILMI at 0.5
@Ricoman your tuning does not look similar to other helicopters that I’ve tuned. Your I gains are very high and your ILMI is dangerously high. I recommended not exceeding 0.1 for ILMI. I think you should take @ChrisOlson recommendation and load the default gains for heli as he’s described in a previous post. Then the only parameter you may need to increase the ILMI settings. Just a thought.
Chris I have done some experiments.
I think this is a firmware problem.
I put the parameters set in the old firmware into the new version of the firmware.
The old version of the parameter did not cause any problems, but it caused problems in this experiment.
I uploaded the parameter set in the new version to FC with the old version firmware.
It was a problematic parameter, but no problem occurred.
I suspect that the list is affected by newly added or missing parameters.
Thanks Bill
I always try to practice the advice of you and Chris if possible.
Of course, very little is done because of my knowledge and experience limitations.
Again, let’s practice the advice of you and Chris.
Thank you for always helping me.
In addition,
What kind of graph is good?
Is it better to completely overlap the graphs of ‘desire’xxx’ and ‘xxx’?
Chris
I went on a flight.
First of all, I have something to report to you.
On this flight our helicopter did not maintain a balanced rpm.
For example, I have set the governor to 6800 rpm, which is actually quite variable from 6500 to 6900 in this way.
I set the needlebelt of the engine.
The rpm moves randomly in the range of 6600-15000.
You will have to tune the engine and set the governor gains and throttle curve. You are using an Aerospire governor with a RSC Setpoint, and that is not the correct way to use the Aerospire. There is no way it can work without a throttle curve.
You must read the instructions for the Aerospire governor. It requires a throttle curve to work right. The way you have it configured at present, if your speed sensor fails you will experience loss of power in flight.
SETPOINT is for electric ESC governors. All combustion engines require use of the throttle curve.