I use pixhawk mini with ArduPlane 4.0.5.
The aircraft is Convegence VTOL.
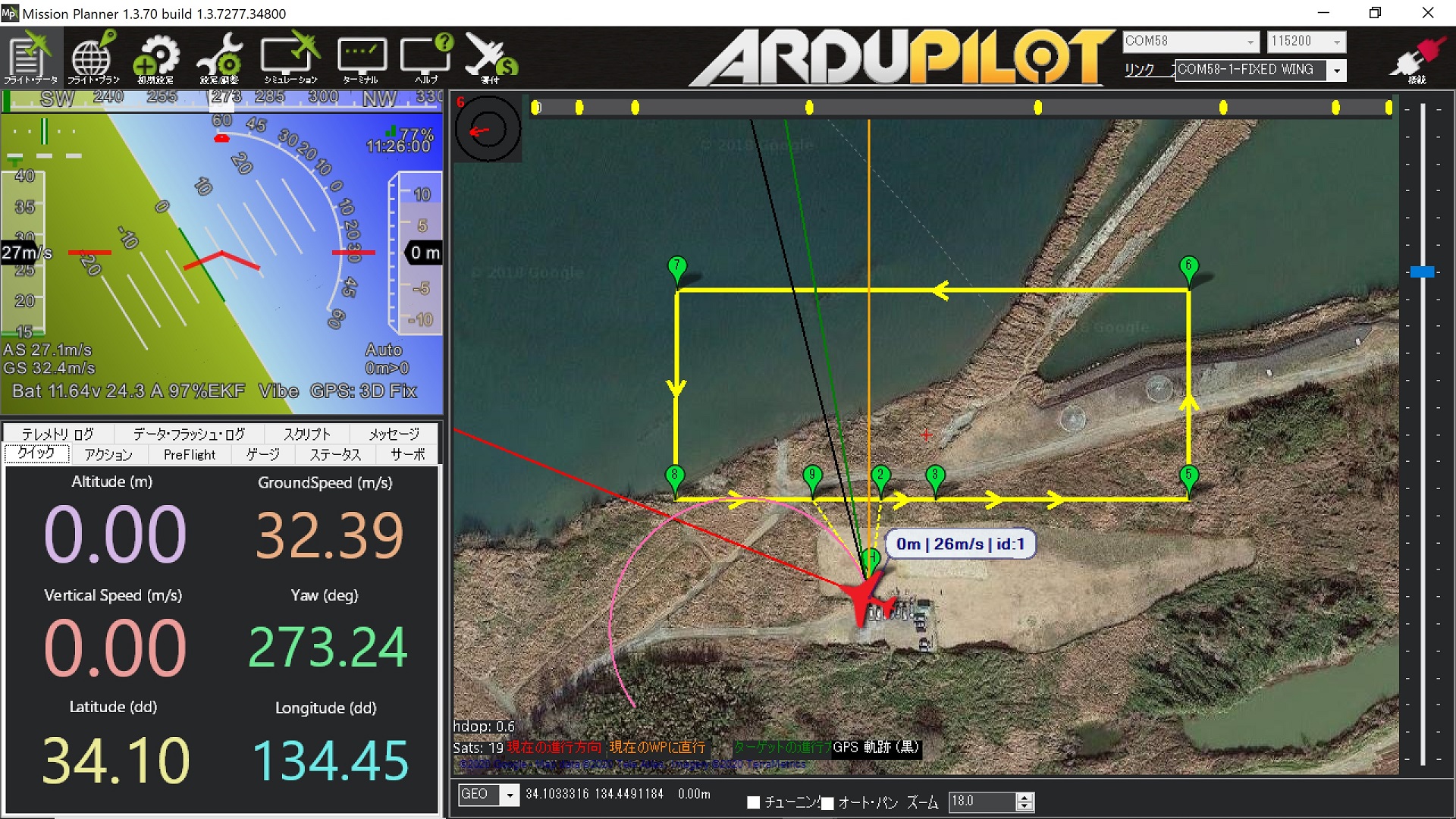
On the mission planner, GPS is 3D Fix, but I noticed that the latitude and longitude are not updated.
Similarly, the altitude has not been updated.
However, the Auto Mission was successful.
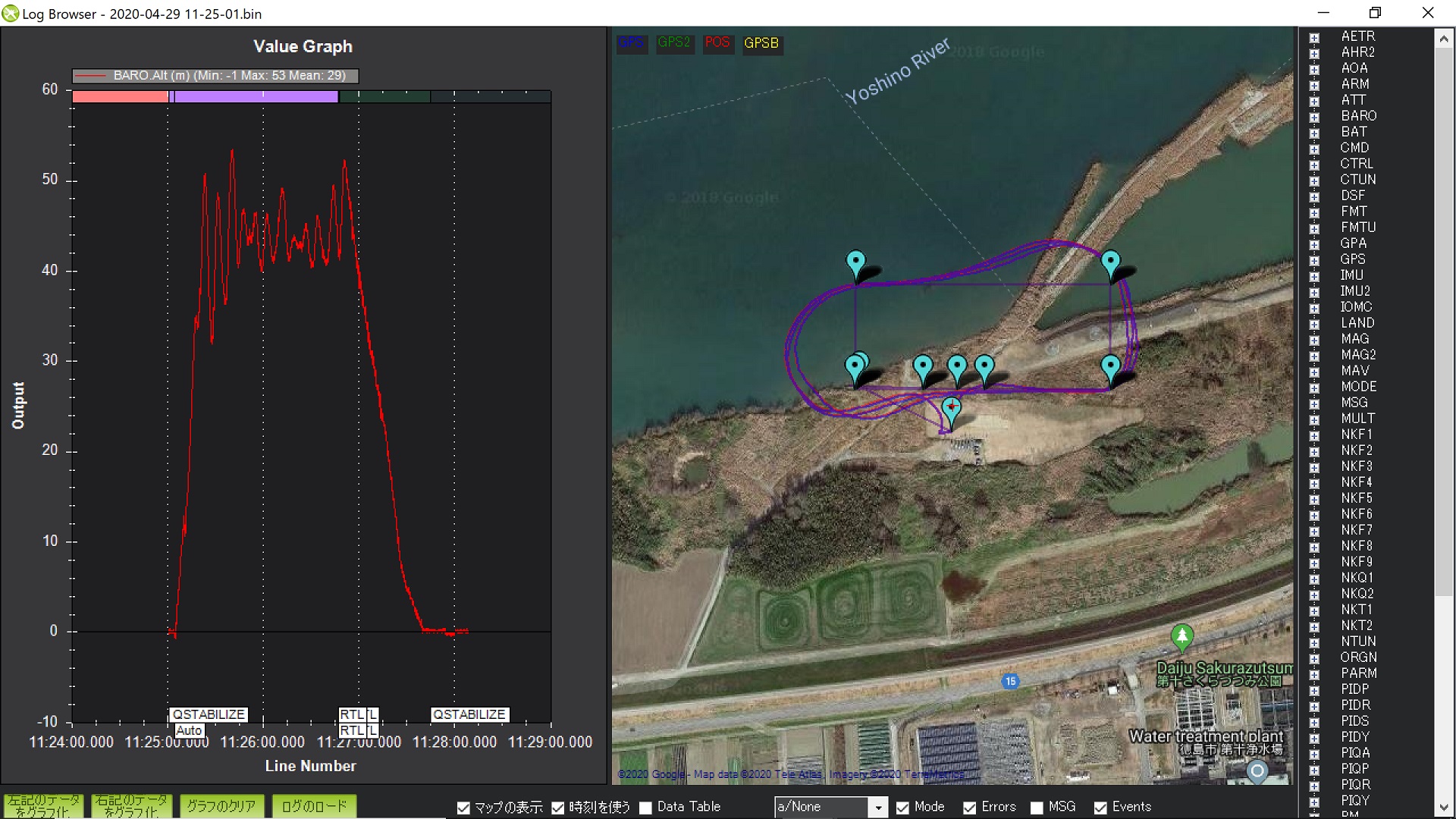
In addition, latitude, longitude and altitude were recorded in the Flash log.
It seems that the latitude, longitude and altitude from GPS are not updated in telemetry.
I use Xbee as telemetry.
And I use many set of Xbees, some of these sets returns less than 77% signal integrity, but it is first time as positon lost on Mission Planner.
Tomorrow, I’ll check GPS data on Mission Planner with USB connection.
My guess is that due the high packet loss, the POSITION stream request did not went through therefore FC did not send GPS packets to GCS.
You can set the SRx_xxxx parameters to send data streams without request, so it will not happen again.
Then, I changed these parameters as below and reboot fc.
new setting:
SR0_POSITION,10
SR1_POSITION,10
SR2_POSITION,10
SR3_POSITION,10
I walked outside with PC connected to Airframe by USB cable.
But, Aircraft marker in Mission Planner did not move.
I checked tlog file which is logged at Auto Mission.
I covert it to CSV file, and took out the part in flight. 2020-04-29 11-18-30-in-flight.txt (147.9 KB)
From this file, it seems that GPS data are sent from fc to Mission Planner.
GPS data has been updated. That value seems correct.
I compared CSV files of Fixed wing data (same FC, 2019/7) and current data.
Current data : only mavlink_terrain_report_t
Normal data : mavlink_terrain_report_t and mavlink_gps_raw_int_t
So, I think this is due to the lack of GPS data on Mission Planner.
ArduPlane 4.0.1 & 4.0.5
If Q_ENABLE is set to 1, MAVLINK will not send GPS information.
But during parameter reading (Dialog appears),GPS information is sent.
After the dialog disappeared, GPS information is stopped.
Since FC uses GPS data, auto and othe mode that uses GPS information can be used.
ArduPlane 3.9.8
GPS information is sent even if Q_ENABLE is set to 1.