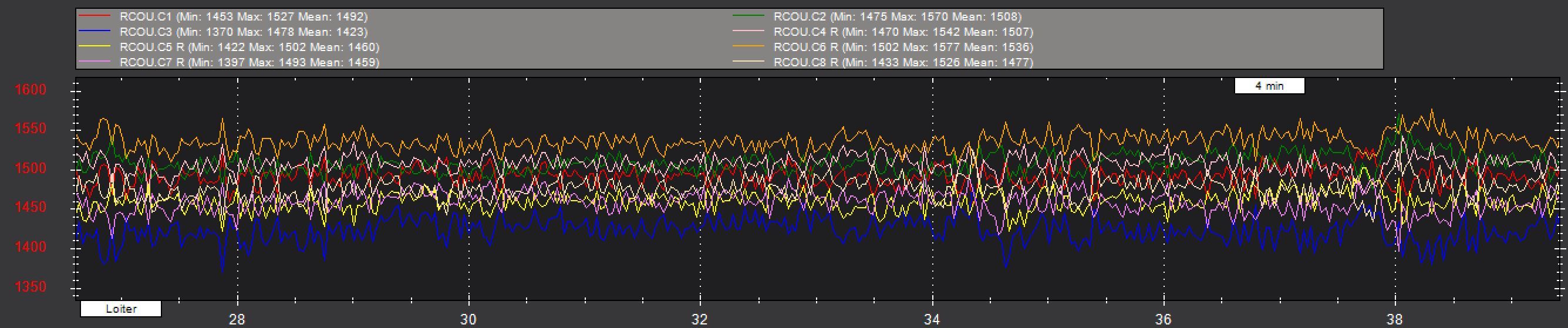
Flying the 1300mm X8 around on a fresh version of 3.4rc2 and as promised the mid point was automatically set perfectly. At first in stabilized it launched up way below half throttle. But that doesn’t seem to make sense with the given pwm on the rcout channels. My MOT_THST_HOVER was set to 0.144, but the the RCOUT is a mean of 1426 to 1532 between all channels at hover. So .144 isn’t 14.4% then lol. Well, it switches from stab to alt hold without moving up or down so awesome job!