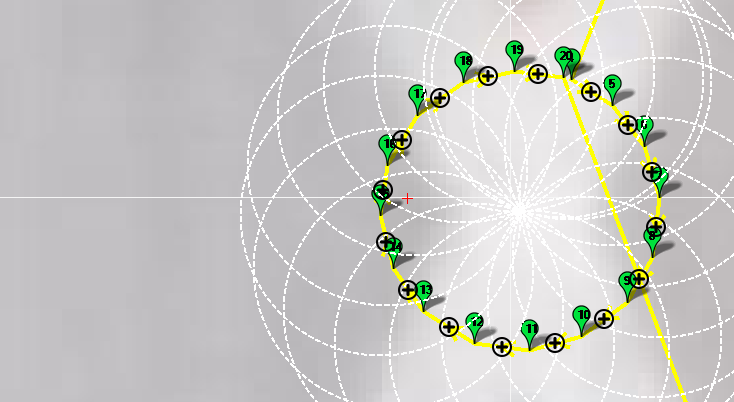
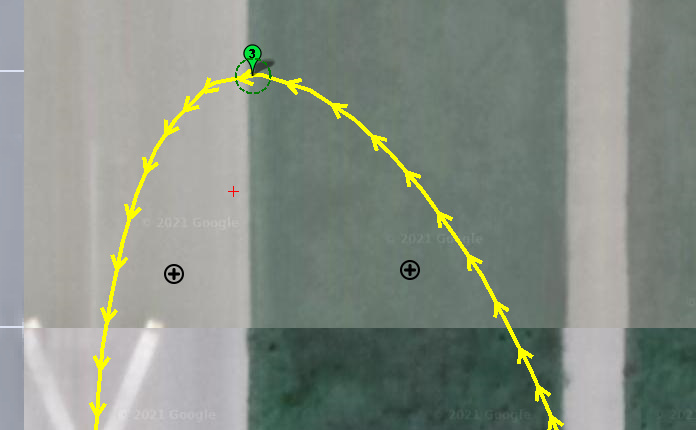
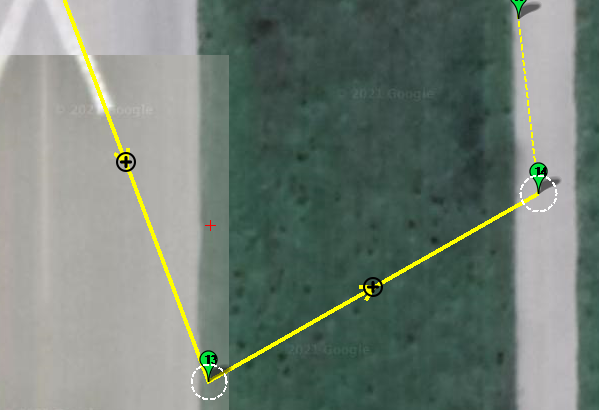
1&2) The least amount of Waypoints to describe the circle will be the fastest I think. It’s much better now with S-curves in this regard but I still think that’s true.
3) You can set it to 150cm but it will likely make no practical difference because the GPS you are using can’t resolve that anyway.
Just a comment here. There are several members here competing in Turkey’s TEKNOFEST and essentially have the goal of flying missions, and dropping payload, in a very restricted area as fast as possible. Very cool to see Arducopter in the mix! I have flown some of the types of missions they need but not this circle mission and it was reported that LOITER_TURNS was very slow relative to a multiple waypoint mission whether it’s Spline or not. I’ve run these in the Simulator and seen the same thing generally.
 )
)