I have two Mauch sensors; one for each battery. Exactly this setup:
https://www.mauch-electronic.com/pixh-2-1-2-lipo-s-2-6s
https://mediaprocessor.websimages.com/width/940/crop/0,0,940x564/www.mauch-electronic.com/PX2%20with%202%20sensors%20LV.jpg
When I went to configure the Battery Monitors in Mission Planner, for the first battery monitor, there is no option for “Cube Orange,” so I selected (as per instructions at Mauch) “Analog voltage and current.”
For the second battery monitor, “Cube Orange” is what I’ve selected for both Volt Pin and current pin:
Which brings to me to what @BrunoBagarini and @copilot have brought up regarding the volt pin:
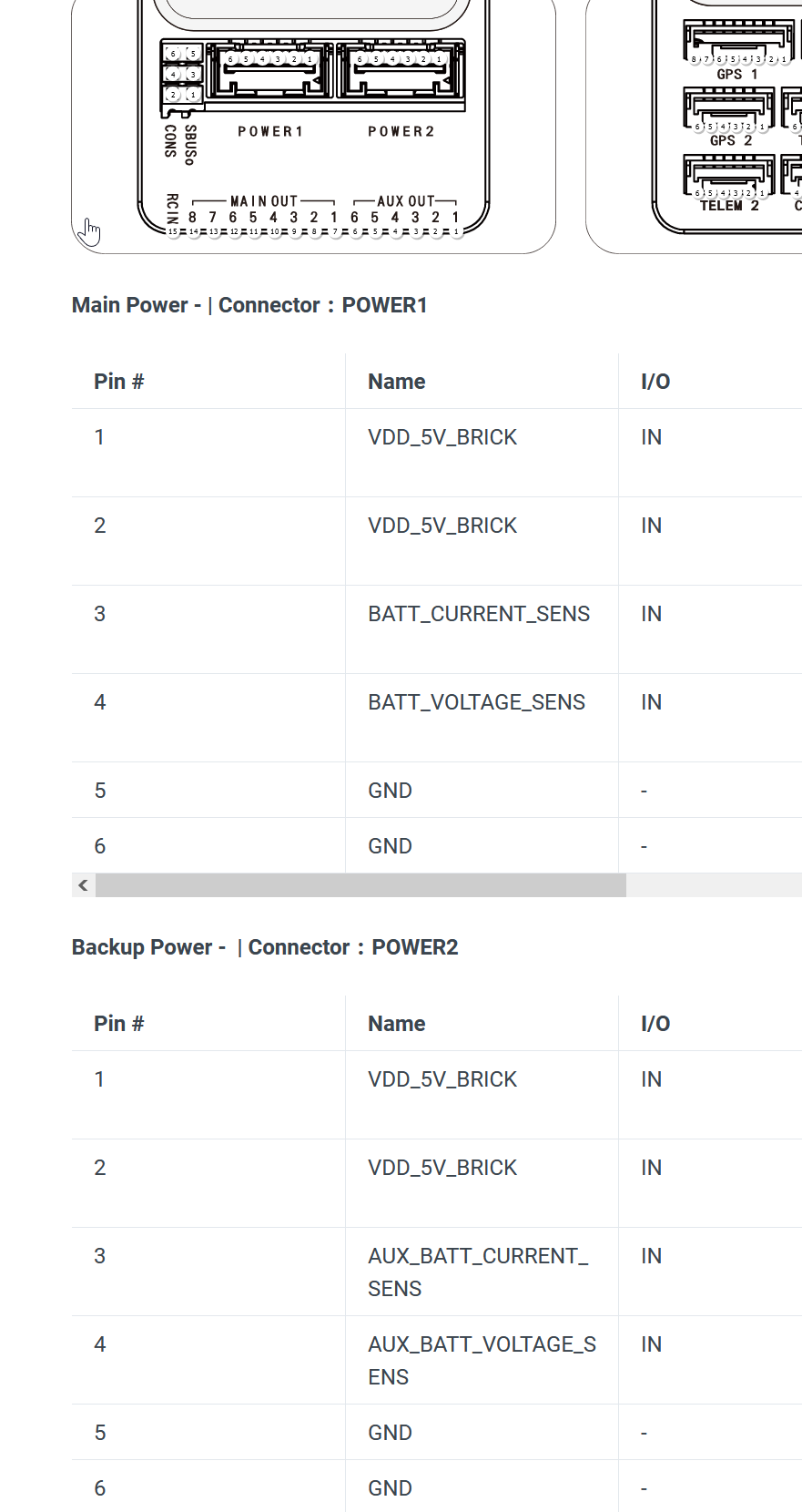
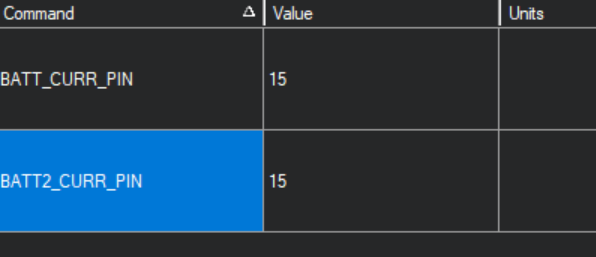
I get what you’re saying about specifying the same volt pin for both battery monitors. Before I change it though, I not noticed that I have also specified the same current pin for each monitor. So when I change the volt pin, shouldn’t I also change the current pin for one of the monitors? Otherwise it would be trying to monitor current for both from the same pin, but voltage for each from different pins…? Then how can I be sure that pin 13 is the correct pin, and what pin for current on the second monitor if in fact I should change it. I’m not understanding about the pin assignments. Over at Cubepilot: The Cube Module Overview | CubePilot I’m seeing different pin numbers for each power connection, both connections only having pins1-6, so pins 13, 14, or 15 just are not making sense to me as to what those numbers are relating to exactly, and what I am doing when specifying the pins.
I’m thinking I’ve entered my battery monitoring settings incorrectly all the way around, as far as what I should have selected in Mission Planner.