Frame size: 890mm
2.Motor & ESC: DJI E2000 PRO
3.Battery: 12S ( 2 x 6S 22000mah)
4.FC CUAV X7
The thing is, I have a successful take off and run some hover test in Loiter and PosHold beause the DJI ESC’s problem I always take off on Stabilize mode. and I’ve test this copter for many days, This is the first crash. I really trust this copter so I push the throttle really fast to avoid some take off motor oscillations, the copter didn’t take off just roll over, although It’s a soft ground but still 1 and 3 motor hit the ground very hard. log’s here https://mega.nz/file/t40D0CzS#Kmx4Ph3BlnvlD2BykSSgx12YweJYAWbcawG-quMUy64
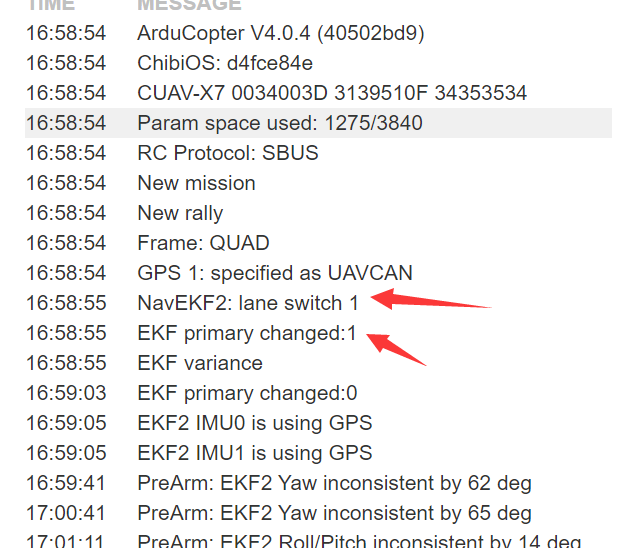
I think the vibration is caused by the copter hit the ground, It a bit delay, and I think It’s some kind of sensor data failure make the EKF very unhappy. as you can see 17:01:11 I have a Roll/Pitch inconsistent by 14 deg. I never the Roll/Pitch inconsistent before.
i think we can ignore other sensors like baro and mag because of stabilize flight mode @XinChengGe sorry for wrong analysis , so i remove them to don’t mislead others
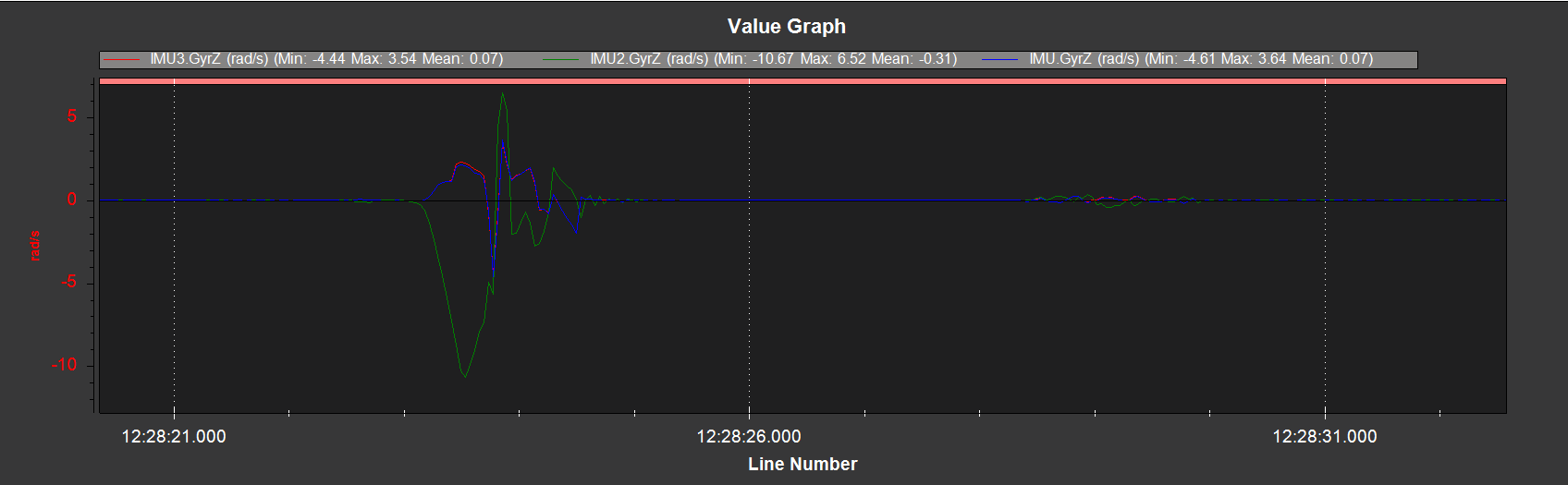
just a little update. I replace the ICM20689 with ADIS16470, and set EKF2_IMU_MASK to 7, but the log shows the second IMU sensor’s failure, I tried again, The second IMU’s data is matching the first and third IMU’s now, So It’s like some kind of sensor gltich??? should I disable the second IMU(BMI088) ?