Hi All i need a little guidance here please .
No matter how low i set the stabilized_roll_ P and or stabilized_ pitch P it still oscillates a soon an it gets airborne and just cant seem to stop it I,ve isolated the FC with anti vibration tape and mounted it on a silicone damping platform.
I’m not sure where to go from here

Hi,
IMHO opinion your parameters are wrong. Do you want to fly Acro or only stabilized modes ? In case you want to fly real 3D, Pixhawk is not really up to the task and is outperformed by i.e. VBar Neo and the other top FBL-systems with rescue functions.
If you need to fly with Pixhawk because of the waypoint modes you have the choice between pure Pixhawk and Pixhawk+FBL-system setup. If you are flying stabilized most of the time a Pixhawk only setup works o.k… In case you have a FBL-system it is usually easy to get a working setup. Tell me what you want and I can give you some instructions.
Hi Mark
Thank you for replying as you can imagine i have spend many hours trying to sort this out.
I want to use this as a UAV way point missions with auto take off and land and park in the sky for filming and observation platform.
With a bit of FPV flying when i want to but no 3D
Cheers
Kevin
Very nice helicopter
First of all, I suggest you use Heli AC3.3.3 version of the firmware. This version of the firmware used, I think it is relatively stable!
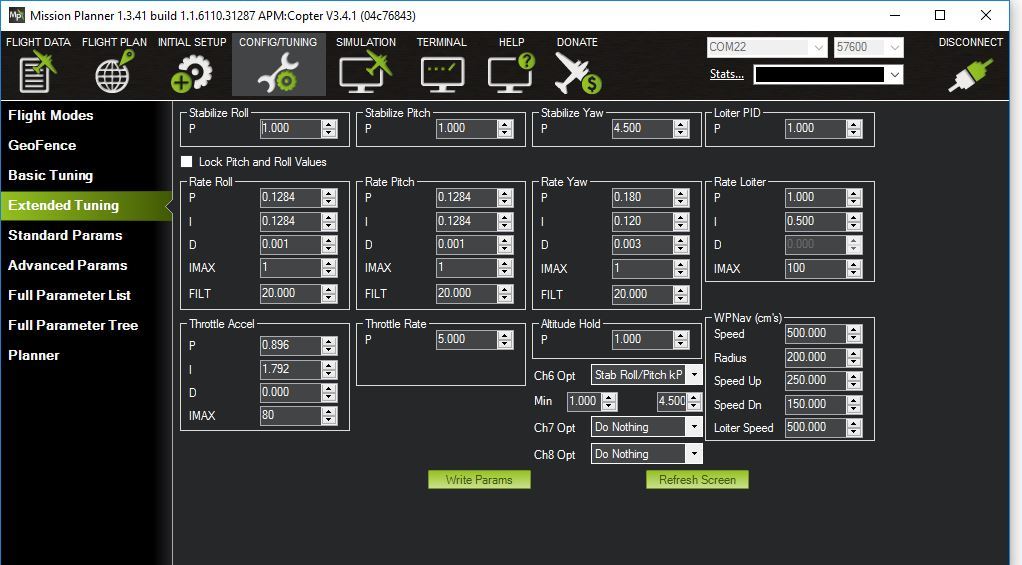
Second, you use the 6-channel knob to dynamically adjust the PID, it is recommended not to adjust the Stb P stable mode, Stb P to the default of 4.5 can be. To go to adjust the Rate_P / R, and to separate the tone. You set the valid range to between 0.001 and 0.1. Set rate_Roll / Pitch_Dw to 0.000.
Finally, the plane is more expensive, I must recommend that you pay attention to safety!
Hi
If i set my Stab P any higher than 1.000 i cant fly it at all it just Oscillates uncontrollably and the Heli V3.4.1 wont let me set the PIDS to the values you are suggesting .
Shock and Stab P little relationship, or determined by the Rate P!
Extended parameters can not modify the parameters of the interface parameters to all the parameters in the table to find the corresponding parameters to be modified, and remember to write parameters
Hi Kevin,
o.k. so you want a ‘only Pixhawk’ setup and no addional FBL-System ?
Please load the 3.3.3 version and reset to default, do the accelerometer calibration (remove Pixhawk from heli) and save your parameters to file.
Set the board orientation and the compass orientation.
If necessary change the TX output (channel number, servo direction) to achieve the correct movements in Radio Calibration.
In Radio Calibration make sure the bars move with your stick left and right for aileron and rudder.
The collective pitch is called throttle and should correspond to your stick movement as well.
The elevator must go down (lower numbers) for helicopter nose down stick movement and must go up (higher numbers) for nose up stick movement.
WARNING !!! MissionPlanner tries to help you and changes your input to the recommended minimum or maximum value. Unfortunately these values are most of the time for multicopters and not for helicopters. Therefore it is recommended to use Full Parameters List/Tree and Refresh to check if the value is what YOU want.
http://ardupilot.org/copter/docs/parameters.html
ACCEL_Z_P = 0.4 (adjust as needed, many helicopters oscillate on collective using standard value 0.5)
H_LAND_COL_MIN = 300 (adjust to your taste, should give you about 3-4° negative collective)
Edit read: http://discuss.ardupilot.org/t/novaerial-robotics-ac3-4-heli-review-and-issues-list/13485/6
DISARM_DELAY = 0 (if you can’t arm because after arming software disarms)
Read attached file
I usually try the heli in Acro mode using ACRO_TRAINER = 0.
I set RATE_PIT,RLL_P,I,D=0 and adjust RATE_PIT,RLL_FF to a reasonable amount of swash movement. Set RATE_PIT,RLL_P,I=default value. P and D make the fast, dangerous oscillations, I is usually slow and not so violent. Use channel 6 tuning, setting the tune = 4 and set TUNE_HIGH,LOW values. Check changing value in Extended Tuning and adjust the knob to give you the default Setting for P and I (D=0).
Understand and set the Fail safe Options !!!
You should be able to hover the heli now very close to the ground without oscillations.
Please report back if this works for you.
AC3.3HeliChanges.pdf (175.3 KB)
Hi Marcus
Thanks for all the help ill try this out and see how we go
The Pixhawk 2 what version of software would you run that on and does this suffer from the same problems
Cheers
Kevin
Hi Markus
Sorry for so many questions would using a FBL system be better than a Pixhawk alone ?
I’m more than happy to do so if it gives me better flight characteristics and more reliable aircraft.
Best Regards
Kevin
Hi Kevin,
the Pixhawk 2 should outperform a Pixhawk 1, but I have never tried it.
3.3.3 seems to work fine, 3.4.2 maybe works better or might have problems, it seems Rob is telling people to be cautious with 3.4.2, therefore probably better to start with 3.3.3
IMHO it is better compromise to use a FBL-system. (I changed my helis to Pixhawk + FBL). In ACRO_TRAINER=0 mode you are flying with the FBL ‘without’ Pixhawk, in the assited modes Pixhawk tells the FBL via aileron, elevator, pitch and yaw input what to do.
May I suggest to make some cautious trials as described in my previous posting. If this setting doesn’t work your other chance is using a FBL-system. What FBL-systems do you have ?
Kevin, I am using a TR 700E with 3 blades and a 3DR Pixhawk mainly for photography. For my purpose the pix-hawk is the ideal flight controller. I have done a number of mission with FW 3.3.3., Photos attached from today when I have tried first time hover with beta fw 3.4.3 rc1. just to find out after my RJX 520 was without problems. What I am try to tell you is get your setup right and the Heli will be flying perfectly with a Pixhawk. Don.t give up. I am 67 years old, When I can do it so can you.

Predecessors, very much appreciate your encouragement to everyone!
3.4.3rc1 firmware, in my current test, in addition to the Guided mode, other modes are normal, boot mode automatically drop the height of the problem, has not been the official Randy, tridge reply!
Hi Fred,
may I ask what headspeed you use on the 700 ? Are these the new asymmetrical VII blades, how do you like them ? I didn’t like the old ones, changed to http://derblattschmied.com/epages/5bb14188-930d-4ac8-9e6a-29ba94ef4ea4.sf/de_DE/?ObjectPath=/Shops/5bb14188-930d-4ac8-9e6a-29ba94ef4ea4/Categories/SSchlag_rechts/1Wahl/700mm
Hi Fred Thanks for the encouragement im so dispondant at the moment as I’ve been flying heli’s for 35 years and find this almost impossible to sort out i have had two Pixhawk 2 and the first one had bad Gyros and could not be calibrated and the safety switch was wired wrong from the factory and i receive the replacement and the safety switch was wired wrong again and shorted the board out so the RC now wont calibrate but im going to try the 3.3.3 set up tomorrow on my old Pixhawk one board and see how that goes.
Thanks to all for this great forum and the helpful people who contribute
Hi Fred Thanks for the encouragement im so dispondant at the moment as I’ve been flying heli’s for 35 years and find this almost impossible to sort out i have had two Pixhawk 2 and the first one had bad Gyros and could not be calibrated and the safety switch was wired wrong from the factory and i receive the replacement and the safety switch was wired wrong again and shorted the board out so the RC now wont calibrate but im going to try the 3.3.3 set up tomorrow on my old Pixhawk one board and see how that goes.
Thanks to all for this great forum and the helpful people who contribute
Hi Markus
I have used microbeast but am happy to try a better one if have any suggestion
Hi Kevin,
may I suggest to try the following:
- put your Microbeast on that heli and see if everything works as expected. Do NOT use the Pixhawk for servos or ESC, pretend it isn’t there ! But please use the Pixhawk to write a log file to check for vibrations. A log file is written when the heli is armed, use your Laptop to arm the Pixhawk.
2a) assuming success using Microbeast I can give you guidelines for Microbeast + Pixhawk 1 Setup
and / or
2b) try Pixhawk 1 without Microbeast.
- decide if you prefer 2a) or 2b)
In case you prefer 2a) you can decide if you want a VBar Neo or another FBL-unit that includes a rescue function. In case the Pixhawk goes crazy you could switch to Acro mode and hopefully save your heli.
I use GT5.2 and VBar and VBar Neo, I don’t think you recognize any difference in stabilized flight modes, as the Pixhawk is in command.
By the way it is VERY important to have the Pixhawk powered from its own BEC, and the servos from another BEC ! Don’t Forget to test Failsafe (no TX, no cable from RX to Pixhawk, etc.), remove the blades and walk your heli in the different modes to see what happens !!!
Sorry for your Pixhawk 2 desaster, I hope you get it replaced.
Hi Kevin. More to my background.I made my income with aerial photography all my live. Now I am retired I am using the TR 700E for my now hobby. First equipped with a 3DR- APM 2.5. Finally I purchased from 3DR a Pixhawk which I mounted on the side of the frame for better excess and checking connections. I had one crash a couple of years ago with the TR 700 during take-off. The power-plug was worn and came off the socket from the APM 2.5. The log file reviled the reason of the accident. This was the only one I had with this Heli. All other crashes were with my two Align TR 450,s and a RJX 500. Now all plugs on the fc have a tiny hot-glue blab. The TR700 Heli has high cf-skids I designed myself. A big gimbal with my Sony 5N fits underneath in the centre. But mostly I use in front under the canopy a Storm 3d gimbal with my Sony 1000 4K action cam. For FPV I have one camera in the nose and one on a little servo gimbal. My cameras are controlled by a Spektrum DX6i by a second person. During auto missions by myself. Recently I replaced my Spektrum DX8 with a Taranis-plus as the flying TX which I like very much. The biggest problem I always have is the total weight of the Helicopter. Because I am using 8000mAh 12S Lipos plus further lipos for the HV servos and for the direct drive motor for the tail. Depends what camera setup I use. The aircraft can have a total weight of over 9kg. Experimenting with blades and a 3 bladed head I do have to consider the heat from the 2 ESC.s and the motors. Using cooling fans on ESC helps.
Overall it is a challenge but I got it working after many trails and testing. Because it is a unusual setup I do not provide parameter data which would certainly not work with a different frame of Helicopter.
Kevin, I believe Markus Mueller has more experience than me and he is one of those persons to take advice from. All the best to you.
Hi Markus.
Thanks for the link of the ‘derblattschmied’ blades. I purchased those spinblades here in NZ about 2 years ago. They alright but if something has a better lift I like to try it. The photos I had uploaded are poor screenshots from my mobius headcam. During testing I always have several cameras going which helps the Heli set-ups enormously. The head speed you can see at the shadow was to high - 1757 rpm. I can go down to 1560 rpm still with a good lift.
Thank you, but I am sure the opposite is true ! I have zero experience with DD-tail, could you please tell me more about it ? Do you use it because of reliability - do you put it on your next heli as well ? What about efficiency ? Can you please tell me more about Motor, ESC, battery size etc. ?