Hi all,
I need help to understand what caused my 7inch Quad to crash.
Setup: Prixracer Pro, FW: 4.36 Bi-directional dshot600 at 400Hz SCHED_LOOP_RATE
What happened: I climbed in acro mode ~500m and tried to dive down but the quad got unstable, so I raised the throttle again to stabilize the quad. But the quad reacted to non of my inputs nor to the mode changes to Loiter or RTL. The decent was stable with a yaw spin. Fortunately it felt into high grass and was not damaged. I flew later again with ATC_THR_MIX_MAN=3.0 and it performed normally.
bin file link: SwissTransfer.com - Envoi sécurisé et gratuit de gros fichiers
Any help is much appreciated
You lost motor 3, probably a desync
In that case it is amazing how stable the copter came down. What can I do to avoid such desync’s? Change of ESC? Many thanks.
I am using a Holybro Tekko32 Metal F4. Would you recommend the TMOTRO F55A PRO from your [ArduCopter 7” Long-Range Standard Build] post instead?
Tekko is a good ESC, you probably just need different BLHeli32 settings
You mean lower Rampup Power & high Demag Compensation? Or are there other settings to look at?
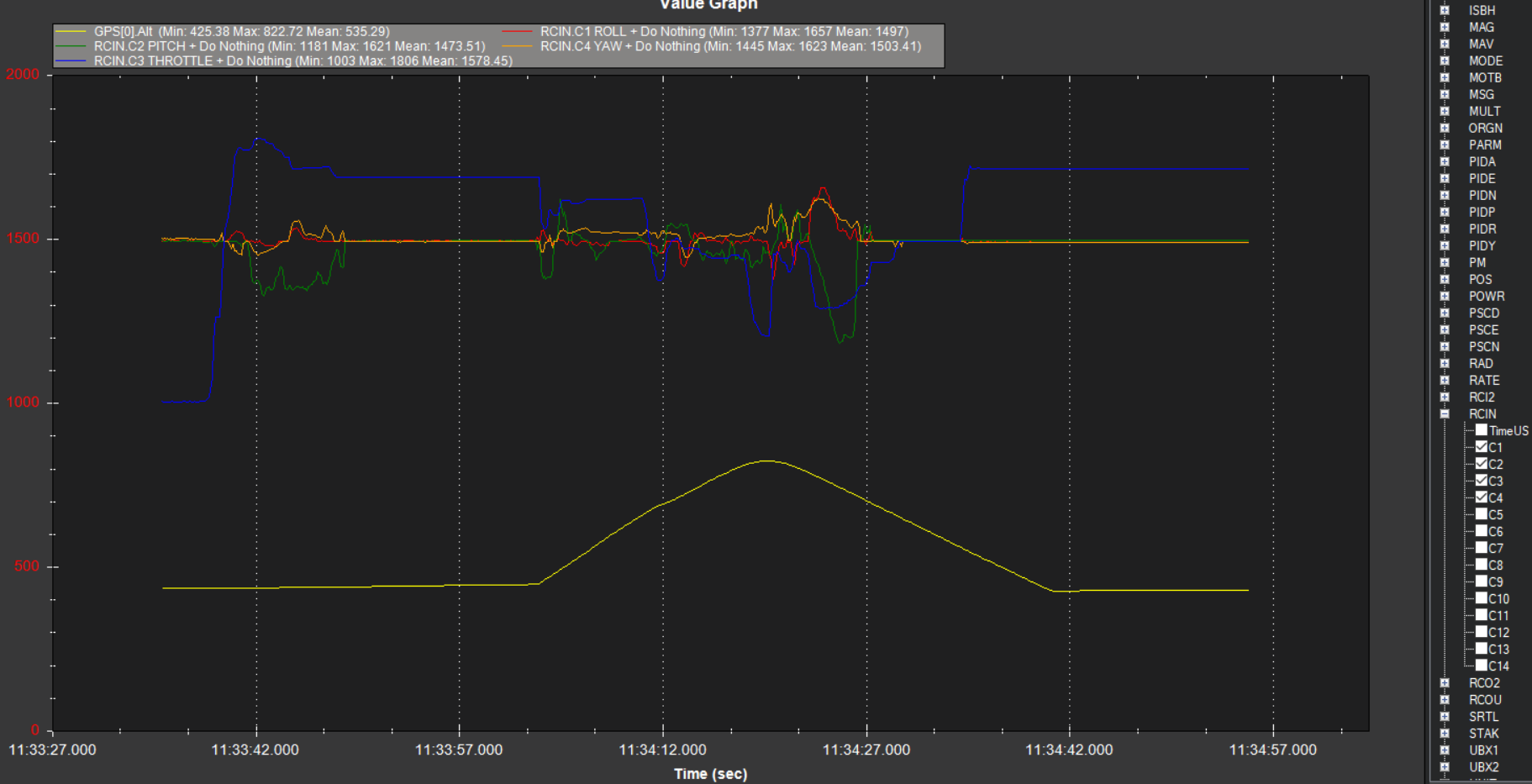
Btw: how did you figure out that it is Motor 3? RCIN3 looks quit weird already from the beginning.
Many thanks for your help.
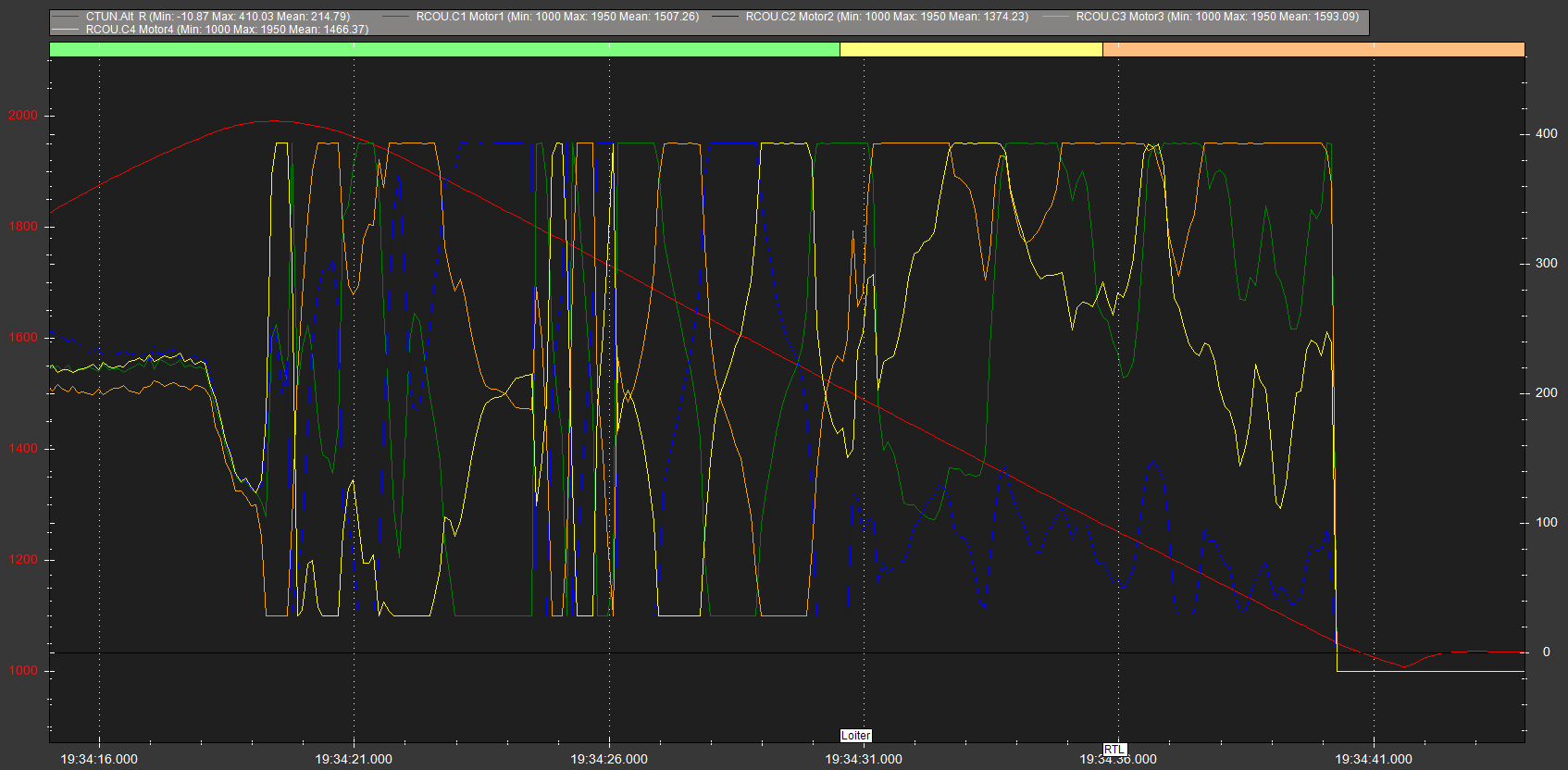
From the point of view of the flight controller it lost Motor4 then Motor3, in fact all motors at some point.
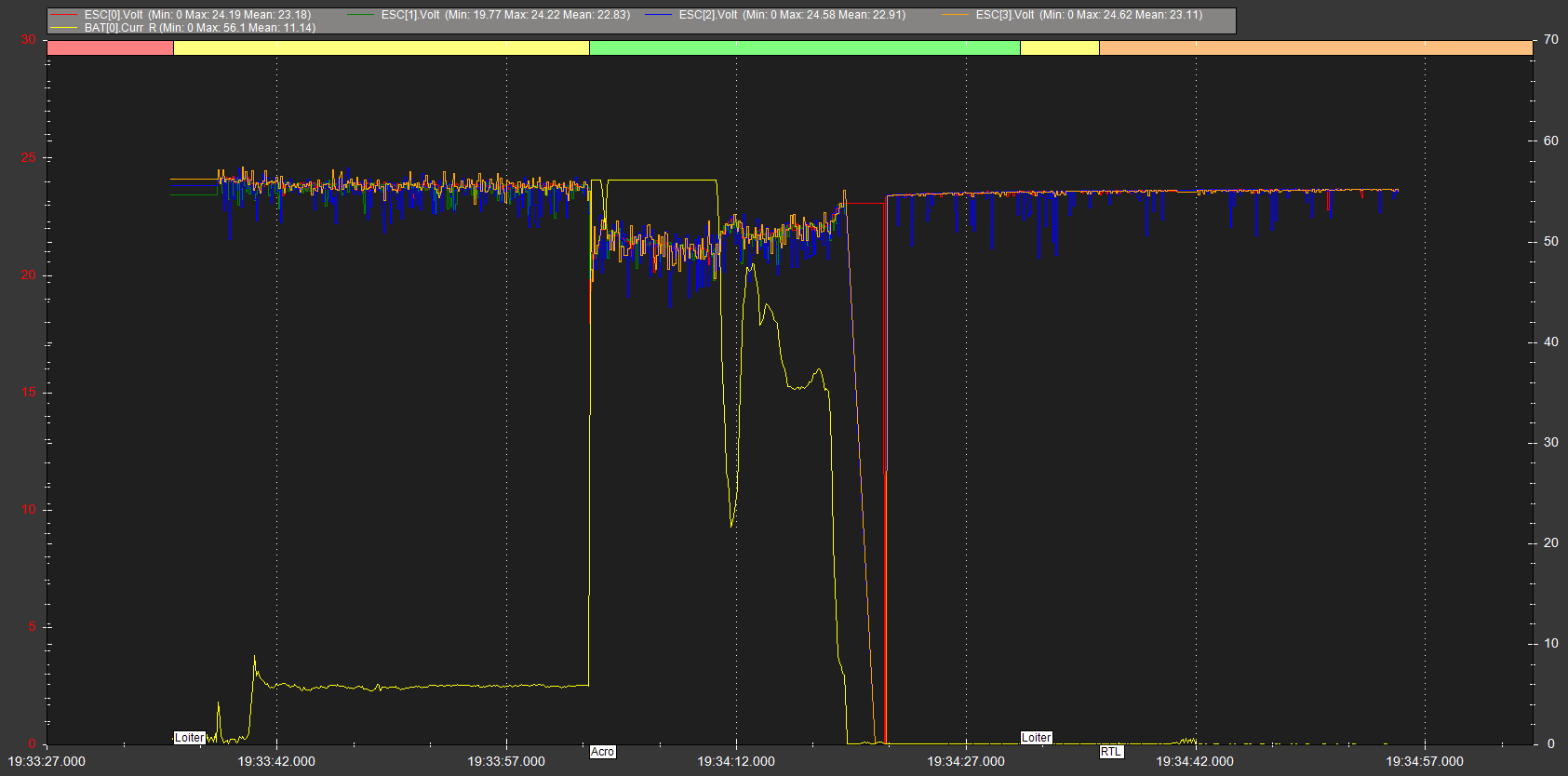
The ESC data shows they lost battery voltage, and other ESC data stopped at the same time. There was errors and the ESCs never recovered.
There could be a connection issue, or a faulty 4in1 ESC.
The flight controller doesnt show the same battery voltage loss.
The odd thing is you HAD been drawing very high current for the climb, but current draw started to drop off before the voltage disappeared - maybe it took time for the current sensor to heat up and go bad ???
MOT_THST_EXPO,0 is not good
This should be about 0.6
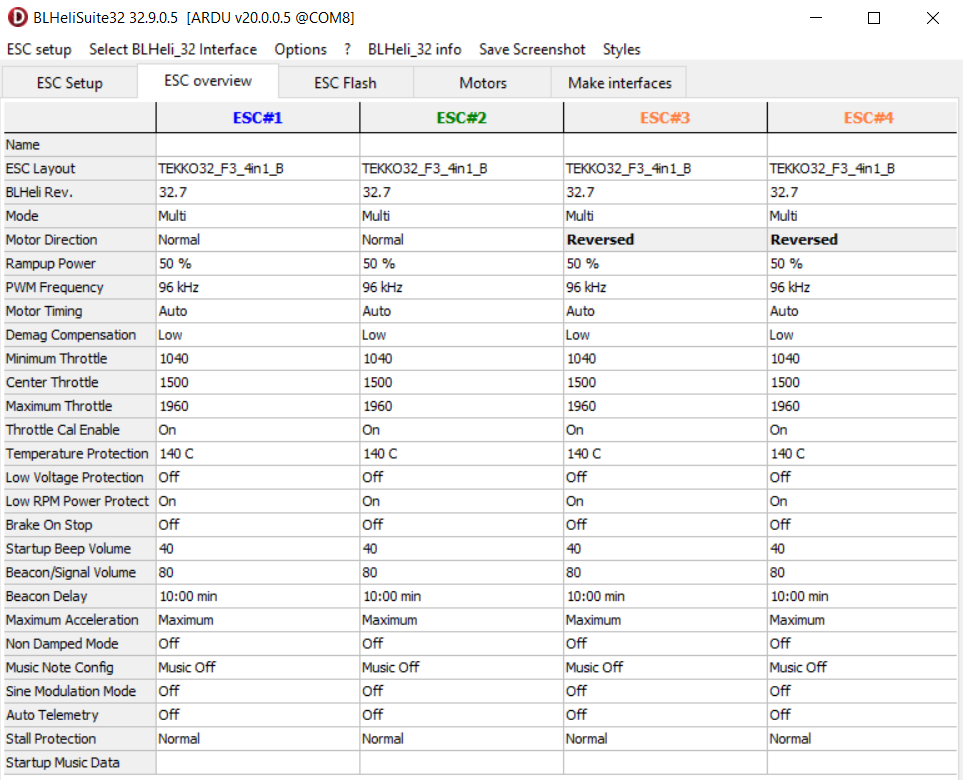
Check for these BLHELI32 settings
- Low RPM Power Protect = OFF (usually for larger props)
- Low Voltage Protection = OFF (rely on the flight controller battery settings)
- Temperature Protection = 90
- Motor Timing = Auto
Once again ESC/BLHELI data proves very useful and we would have almost no idea what went wrong without this data. We still dont have a definitive answer in this case, but certainly a much better idea of where to look.
I appreciate all of your help very much.
I flew this quad with normal dshot600 (non Bi-directional dshot600) with an old Pixracer for 2 years without any issue. And just now I switched to a Pixracer-Pro and gave the Bi-d a try. (the performance is now much more lock-in though)
Attached my BLHeli settings:
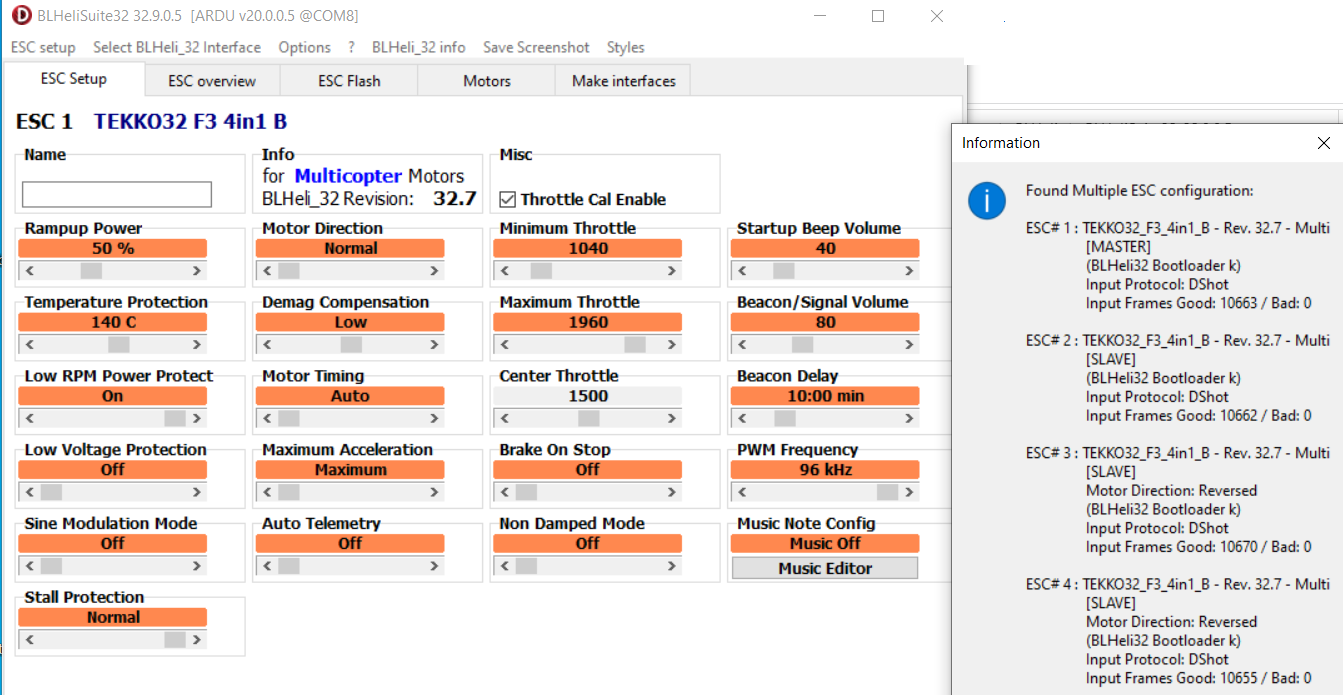
For the suggested Low RPM Power Protect I am not sure if that is helpful.
The BLHeli Manuel states for Low RPM Power Protect: However, disabling it increases the risk of sync loss, with the possibility of toasting motor or ESC.
More helpful could be high Demag Compensation: Generally, a higher value of the compensation parameter gives better protection. If demag compensation is set too high, maximum power can be somewhat reduced.
That doesn’t apply to all Motor kV’s. At some kV point Low RPM Power Protect will limit power. With 1300kV motors with my 7" it’s off. Search the forum here for “low rpm power protect” and you will find many use cases where it needs to be disabled.
Isn’t there 32.9 firmware available for that ESC?
I would upgrade to 32.9 and change PWM frequency to “by RPM”
It seams it is a well known issue for tekko32 F3 with bidirectional dshot on 6S.
To reduce the risk they suggest PWM to 48kHz and demag to high.
I ordered the new Tekko32 F4.
This is not the issue. I spoke to Holybro about this - version B was recalled because of this problem in 2020 so none of the Tekko’s on sale today have this particular issue. I do not know why the ticket is still open.
My guess would be
- 1000kv or lower
- 9 inch props or bigger
needs Low RPM Power Protect enabled.