After discovering this project and having been reading around for a while I’ve have decided to bring my old Trex 600 Nitro back to life with Ardupilot and a Pixhack v3x controller.
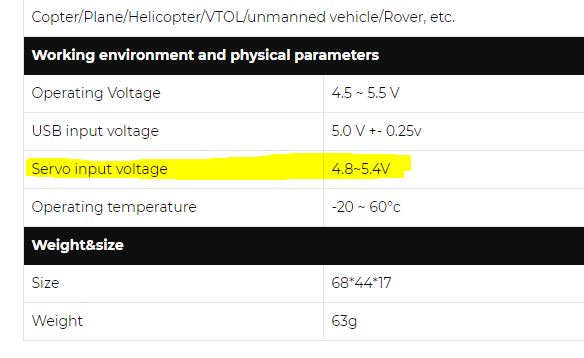
As far as I understand, an external power supply must be used to feed the servos, and according to the board specs, servo input voltage should be within 4.8 and 5.4v:
Does it means the board will not accep 6v servos with a 6v BEC?
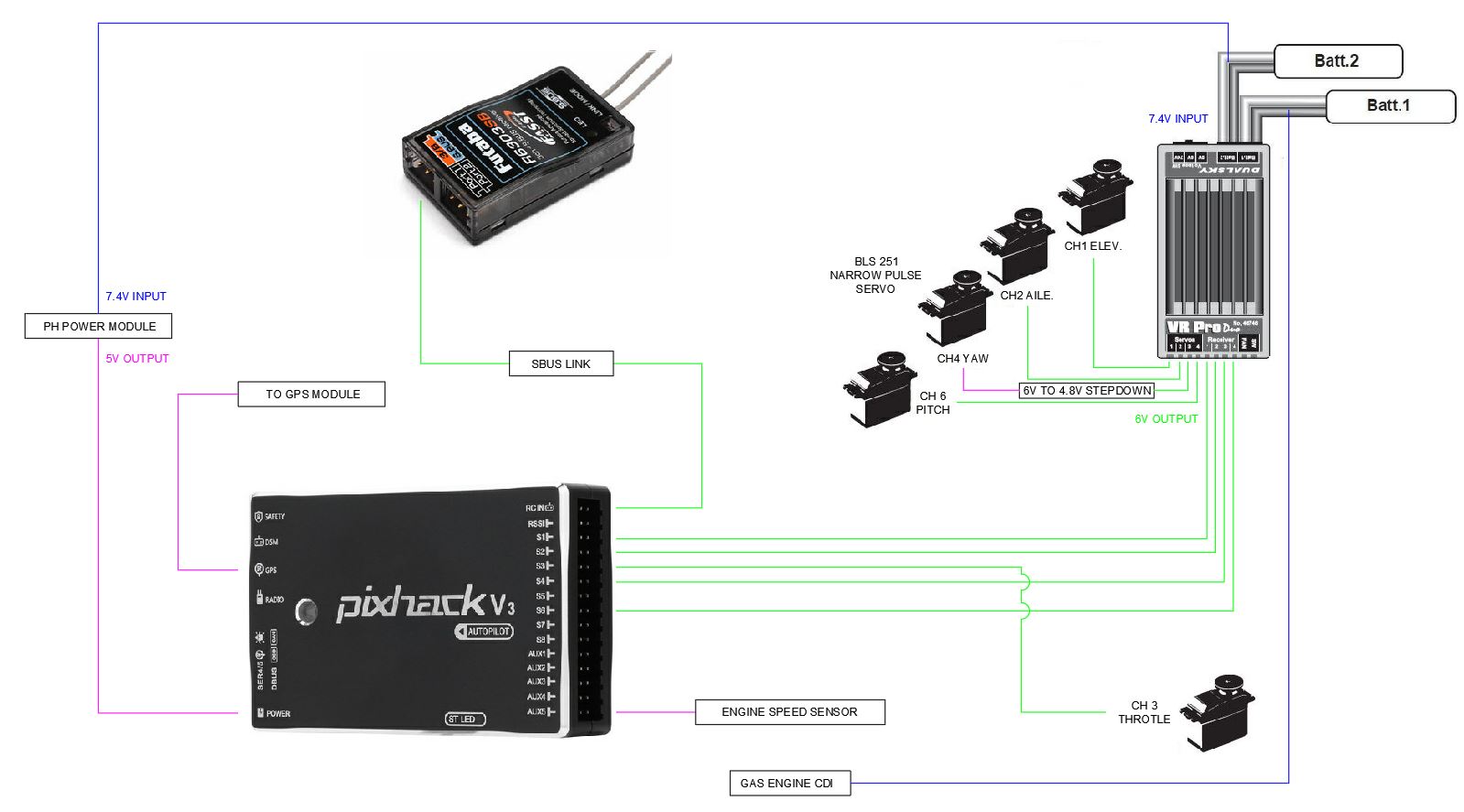
The idea is to wire up the helicoper in the following way:
Hi Joan,
I do not know the answer to your question. I don’t use the high voltage servos. typically I use castle creations regulator set to 4.8VDC and plug it into a open channel on the servo rail to power all of the servos. In your set up you might be able to pass the signal and ground to the device that is providing the 6 VDC power. However you might have to supply power to the rail in order to use your engine speed sensor. @ChrisOlson has used the V3x quite a bit and he might know.
Please use the tradheli wiki. You’re wiring diagram is incorrect to how the servos are assigned in the default setup. You are showing a typical servo assignment for RC helicopters.
The swashplate servos are connected to the Servo output channels 1 thru 3. The tailrotor servo is connected to servo output channel 4 and the throttle, called HeliRSC in the firmware, is connected to servo output channel 8. You will want to spend some time reading the Rotor speed controller (RSC) wiki.
Also for your yaw channel which you indicate is a narrow pulse servo, be sure to change the min, max and trim parameters before applying power with the servo connected. The default values are for standard pulse width.
I use the V3x control with straight 2S (up to 8.4V) power on the servo rail with HV servos. Only downside is that the board won’t be powered from the servo rail if the voltage on the rail exceeds 5.6V. It can be powered from the power port with a BEC or the so-called “power module”. And from the USB port. But rail voltage must be <5.6V to use the rail power for backup power for the flight control.
All that being said, I don’t actually run my HV servos at full 8.4V. The engine has a generator that maintains the servo rail voltage at 7.85V