I know this subject has come up before, but with this new firmware, they’ve become OBE.
I’m testing a new X8 with TMotor U5 (KV400 & 15" CF props. The AUW (with payload) is about 11kg. According to the manufacturer’s data I should be at only 60% motor output to maintain hover. I can barely takeoff and maintain a hover at full throttle, and as I get about 50% into the battery life, I can’t even do that.
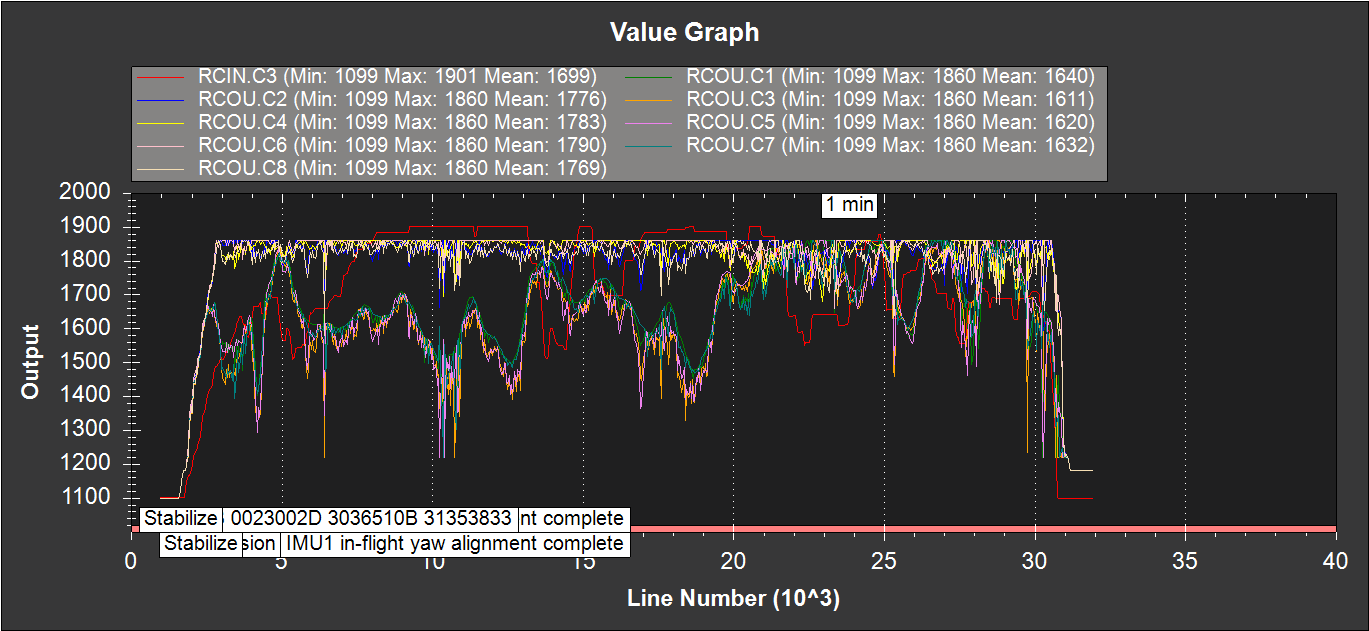
As you can see the throttle is maxed out much of the time. The even motors are at their max almost immediately, and the odd motors gradually max out. However, I could barely maintain altitude the whole time.
I really should be getting MUCH more thrust out of full throttle than this. Maybe this is due to the reserve the FC is keeping for attitude control. I have ATC_THR_MIX_MAX & ATC_THR_MIX_MAN set to 0.5, the lowest according to the docs.
Since I have a large X8 intended for payload carrying, I am willing to sacrifice some attitude control for throttle (altitude) control. All my flight maneuvers will be docile, so I’m willing to go 75% for throttle. Any idea how to do this? I’m going to try to set ATC_THR_MIX_MAX to 0.2 tomorrow and see if the FC will accept that low of a value.
As a side note, I have also been experiencing a lot of yaw during takeoff and flights. It’s interesting that all the even motors (those that spin the same direction) are maxed, and the odd motors (spinning the opposite direction) are not. This undoubtedly is causing some non-zero torque, which could be causing the yaw problems. Any ideas?
Your Octo is too heavy for your setup. Max weight should be around 7kg with 90% efficiency setup (dream) and 50% throttle.
Do not expect to fly with so much power (75%) needed to maintain altitude. You need reserve for attitude control (wind, turbulence and landing at the end of a rapid descent with depleted battery).
At best you can have a try with 16*5.4 propellers.
You do not mention your battery. Some are really lazy and are not delivering expected power when needed…
Thanks for the reply Marc. Unfortunately, the program is proprietary so I cannot post pictures of the aircraft.
Here is what I can tell you.
Motors: TMotor U5 (KV400)
Props: TMotor 15x5 carbon fiber
Batteries: MaxAmps 6S 6000 x 2
FC: Pixhawk 2.1
Configuration: X8
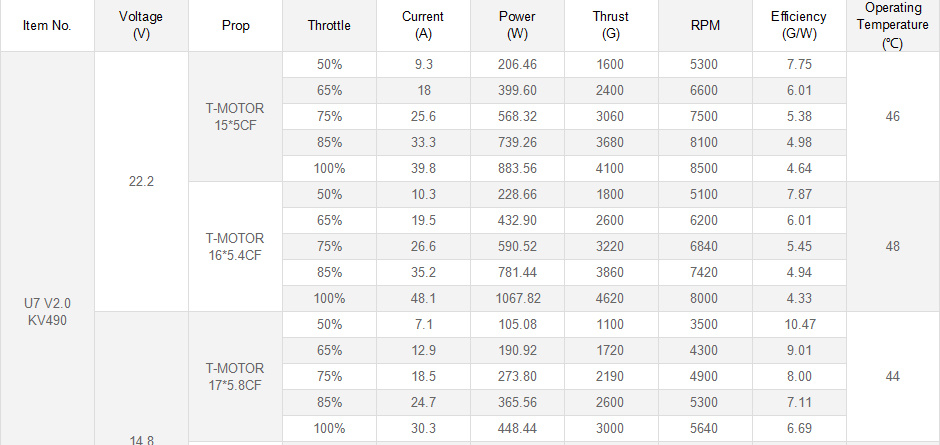
Here is the manufacturers data for the U5 at 6S (22.2v).
For an AUW of 11kg (assuming an efficiency of 85%), I should be at about 68% thrust at my max weight. That leaves 32% of the remaining thrust for very docile attitude control, and we will not fly in anything above light winds (<10 kts). The remaining thrust margin (even at 85% efficiency) is around 5.4 kg of thrust. Are you saying that isn’t enough for attitude and altitude control? I’m just not sure I believe that this can’t be done.
However, let’s for a minute agree. How about this?
Based on this, and 85% efficiency, at 50% throttle I should get 10.88kg of total thrust.
Based on my analysis the motors add an additional 832g of total weight but provide 4150g of additional thrust. Accounting for the weight of the motors, this provides 3.32kg more thrust, AND gets me to my target AUW at 50% throttle.
BTW - the MaxAmps batteries are very high quality, and performance over a couple of dozen flights has been very good. They hold their voltage (after initial drop) and current quite well for the duration of the flights. They have also held up very well under multiple charges per day.
My result was from that data. You need around 1650 W to maintain altitude (150W/Kg or 210W/Motor). If your config is Octo8-Quad X, you should expect lower efficiency so more power needed.
Performance factor is Efficiency (G/W).
Larger props could help you to hover at 65%.
Did you try to redo the ESC calibration?
For ATC parameters, I fly lower weight Octo-QuadX, around 4.5kg with default parameters.
Yaw problem: Could be a motor not flat or a Quad-X config with all CW on the upper side, and all CCW lower side.
We run the same motor prop setup on all the Octo’s
TOW is about 8.5kg for each and I have to add about 10kg of weight to do the compass/motor calibration to keep it on the ground. 8kg of weight and it’s starting to lift off the ground.
Can you post a data flash log?
A bit hard to pick anything up from the descriptions other than ‘yes, it SHOULD work’
It’s always a hazard to assume performance from the figures of the manufacturers, as I have seen many a lemon built on net specs, the worst being a $50K X8 from Oslo that performs almost exactly as you describe except it was spinning 28" props.
I do have to correct an assumption your making with thrust from the figures.
In practise you will not get 100%, you will only get 80% at max throttle, the rest is kept in reserve for stability.
So at 68% you do not have 32% in reserve you only have 12%.
More data please and how about a pic.
This is obvious but I have to ask, are the props on the right way round?
I’m sorry, but our program is proprietary. There are some items on the aircraft that can’t be photographed right now.
However, I’m happy to share some of my test data.
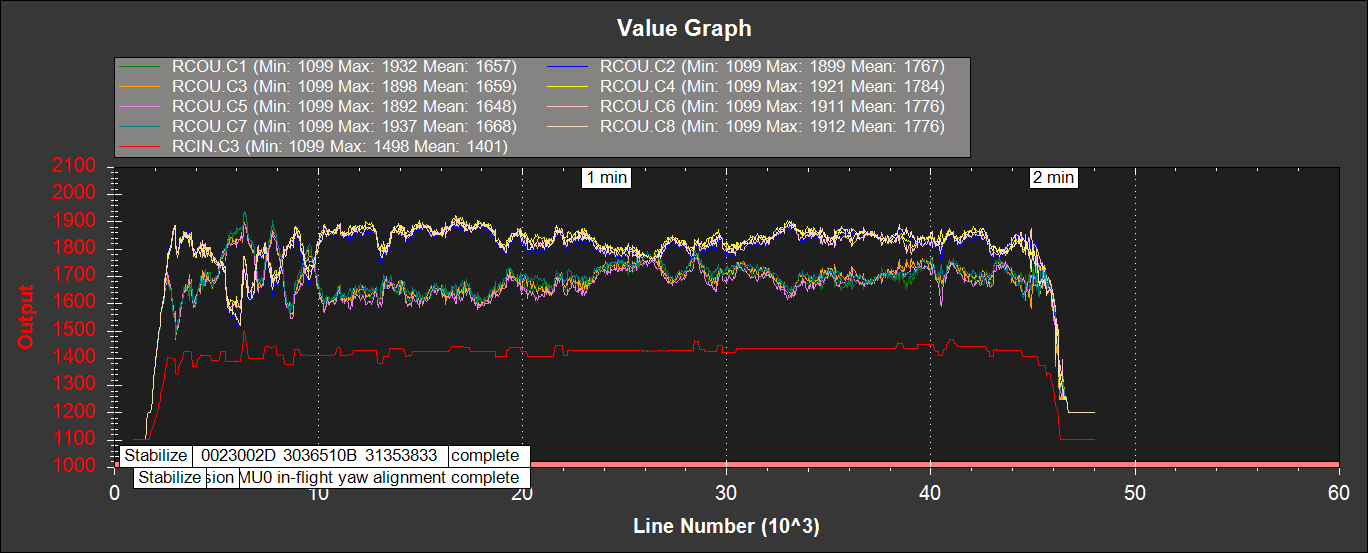
We actually had a BIG breakthrough in testing today. I’m a desperate man, so I took a shot in the dark. I changed the ATC_THR_MIX_MAN parameter to 0.35. Yes, I know the docs state the lower limit is .50, but again…shot in the dark. It worked!
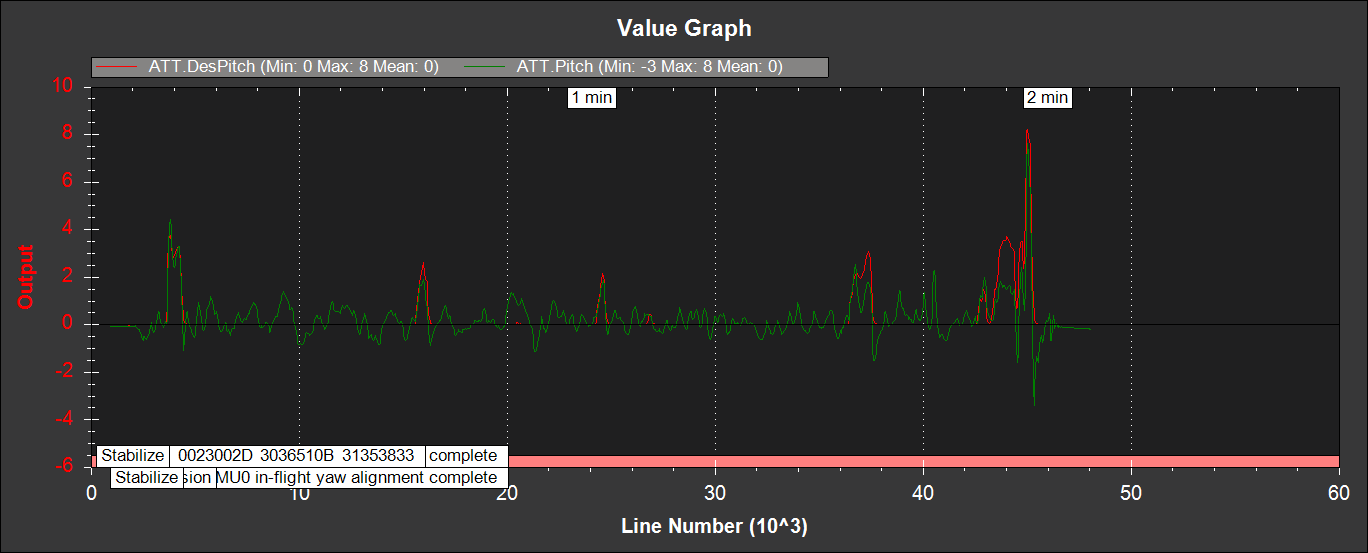
The aircraft throttle margins are higher, so they don’t saturate AND pitch/roll/yaw stability seems to be good.
Here are some of the data I’ll also include the DataFlash logs.
The DataFlash logs are too big to upload. I’ll have to figure out how to get them to you with a link.
So, here is the next BIG question. It appears that the even motors are performing at a higher value than the odd motors, AND they are almost exactly mirrored around 1790 PWM value. Here is my guess on this. the 1790 value is the value needed to keep my aircraft in a hover IF all the motors were perfectly matched and straight. The even motors are spinning in the same direction (per the Copter docs), and the odd are spinning the opposite. There must be some residual yaw from someplace that is causing this split, or they should all be exactly matched. Correct? I’m guessing one of my motor mounts is slightly out of alignment and is causing a slight yaw. It gets worse with higher throttle.
Oh! It would also be helpful if someone could help me understand why the throttle parameter is at about 1400 and the mean motor parameter is at 1780. I would expect them to be the same, or nearly so.
Hi, in this situation, I will first check motor alignment for 1,3,5,and 7, especially motor 5. Rc in -what the transmitter outputs,rc out -what the FC outputs.
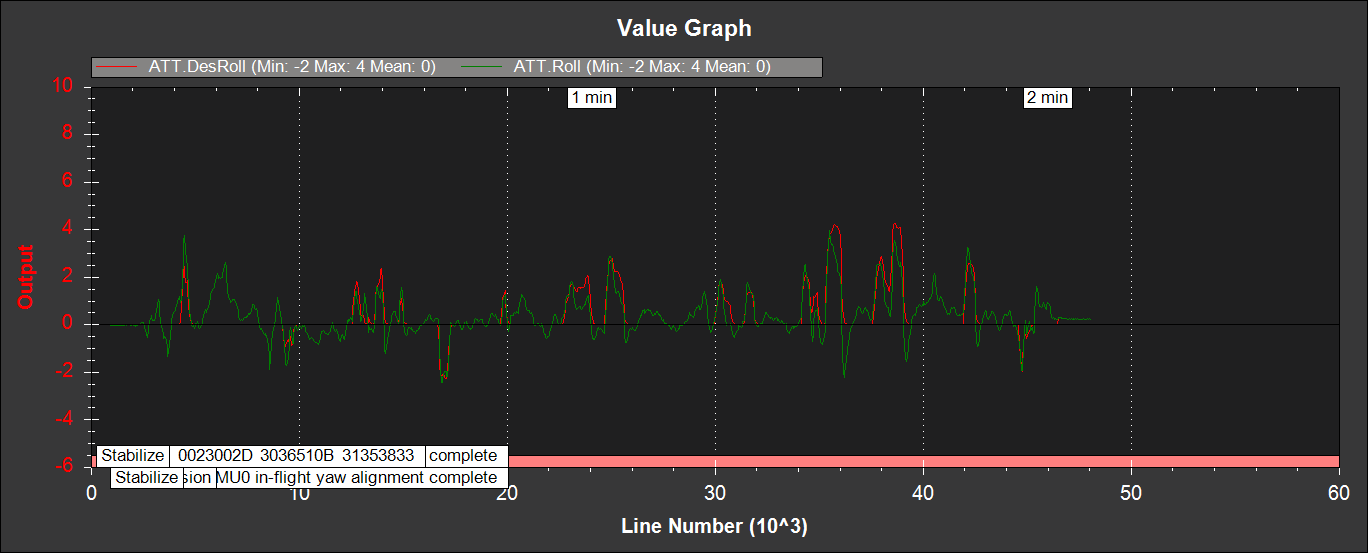
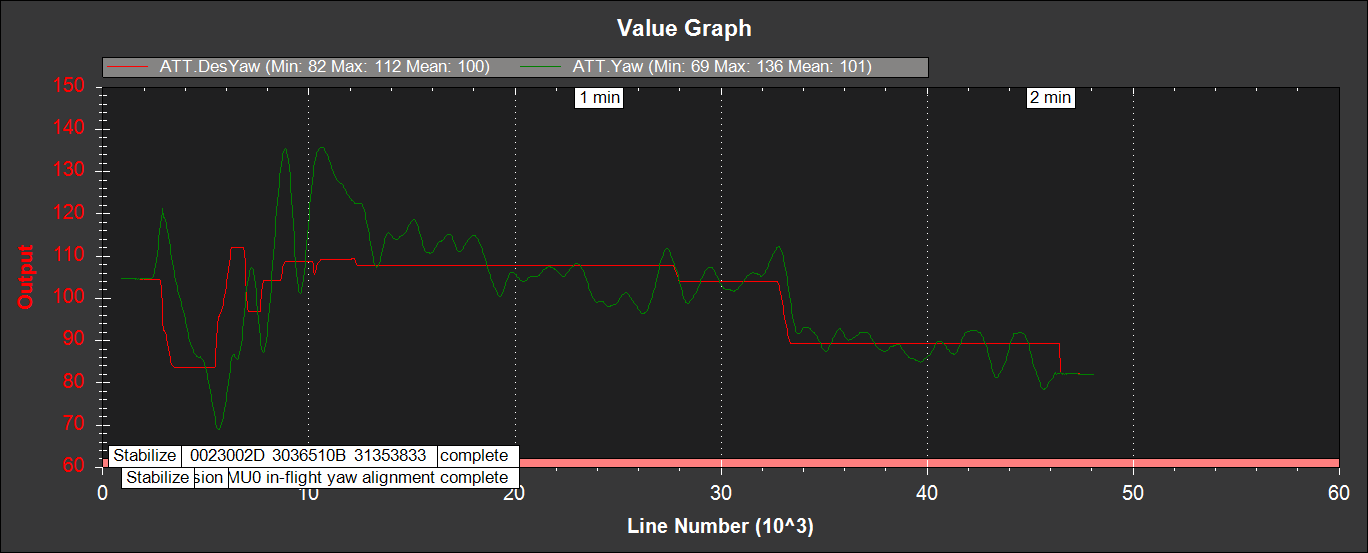
So, I thought folks might like a follow up to what we’ve learned about the reason for the split RCout parameters. We plotted yaw difference (desired vs actual), along with the diff between odd and even RCout channels. They are almost exactly correlated. Minor diff for other control inputs. So, seems mystery is solved. FC is simply responding to yaw error. Which, right now still needs some work.
I had a very similar probem with my Y6 after some modifications of wiring. At the end the reason was a swapped upper and lower motor - what results in the FC working hard to control yaw.
If it helps to calculate thrust for a coax copter there are two factors to consider. You generally need to leave at least 20% of available thrust to allow for attitude changes, especially yaw. So if you have a max thrust of 10kg as an example your max take of mass is already at 8kgs. You also need to account for the loss of efficiency in the coax setup. Again 20% loss is not a bad figure to use (I think its less but this leaves a little headroom. Thus the max take of mass would be 80% of 8kg or 6.4kg.
Using the data of the U5s:
Thrust per motor: 2.48kg per motor x 8 = 19.84kg of thrust available in total
Allowing for 20% loss of efficiency due to coax setup: 19.84*.8= 15.87kg
Allowing for 20% headroom for attitude changes: 15.87*.8= 12.7kg
Also bear in mind that the actual thrust you get may vary depending on how accurate the manufacturers figures are, air density and temp.
So an 11kg machine is getting close to the limits. X8s when close to the limits often are very loose on yaw as maintaining pitch roll and height take priority. At least this is my understanding of things and I could be very wrong here.
For the U7s: 4.18=32.8kg max thrust on paper
Coax efficiency loss= 32.8.8=26.2
Headroom= 26.2*.8=20.99kg
If you want to allow for a motor failure then 1 arm is left with 1 motor and on the assumption that this uses a regular shape (ie motors equidistance), then 1 motor at 80% to allow for attitude changes provides the max thrust figure per arm (or 1/4 of the total usable lift).
So with the U5s that would be 2.48*.8= 1.98kg or a max take off mass of 1.984=7.9kg
With the U7s that would be 4.1.8=3.28kg or max take of mass of 13.1kg
To anyone who reads this I am very happy to have this theory torn to shreds if you think I am way off the mark but it is a theory that has stood me well. We fly a 20kg X8 (admittedly not on Pixhawk at the moment but that is shortly due to change) and we have had a few occasions when a motor has failed for one reason or another and it has flown as if nothing happened.