Does anybody have a reference to exactly how this works? I have read the Ardupilot documentation but it is not very clear. In fact the instructions are not complete. A person provided a specific list of settings that seem to work. There is only one flight mode that is marginal. The combination of offsets, end points, mixes, master, slave, pos mix, neg mix, etc. is confusing. Surely someone has a good explanation.
Don’t know what you mean by mixing ch 5 and 6. Channel 5 is default. If you are talking about something you read or watched that applies to PX4 forget about that.
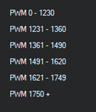
As far as Arducopter goes this is all you need to know for 6 flight modes:
All else is dependent on your Transmitter switch mixing to the the Flight Mode channel.
So, create another post in the Radio section asking about how to mix 2, 3-position switches on that Flysky Transmitter to achieve it. Or, use search in the forum for “flysky flight mode” and see how others have struggled with these radios.
As I understand it, each channel outputs values (pulse widths) from 1.1 to 1.9 msec. So a three position switch, SwC, on ch 5 would for example output something like 1100, 1500, and 1900. Then you can get another channel on SwD on Ch 5 that outputs 1100 and 1900. So by scaling and offseting one or the other and then adding them together you can get 6 different values that fall in the ranges of the chart you showed. I followed exactly a setup that someone posted and it worked very well except that FM 6 results at a value of 1750 and that is exactly at the boundary of FM6 so I need a bit of tweeking to put the output values within the designated ranges with a little margin.
I have watched You tube for help fut they are confusing. The direction on Ardupilot are not complete. The settings posted by a user are pretty good.
You are off base. All mixing has to happen on the Flight Mode channel which is Chan 5 by default. Mix your switch positions on that Transmitter to Chan 6 only. It’s not an Ardupilot question, it’s Transmitter question.
Well, all I can say is to look at the ArduPilot documentation under Flight modes and scan down a bit and you will see a link to set up a 6 mode transmitter. Then you can select my particular transmitter. Then you can follow the directions but they are not complete. In fact, the doc shows settings that are not on the radio at all so there is no way to set them. However, a user has graciouslyu provided his settings and I have entered them into my transmitter and theyh work., Then I go to flight modes in MP and move switch C and D and amazingly, there are 6 different values and you can set a flight mode to each of the 6 values. Like I said, I have done this. Today. The onlyh issue is tht FM 6 value is at 1750 and that is exactly at the boundry between FM5 and 6 so it needs to be tweeked. I just want to know how this is setup.
The settings are…
John Cabrer February 7, 2018 at 4:34pm
Here are my settings for the Turnigy TGY-i6. These will give you six (6) flight modes using SwC and SwD
Firmware 1.1 9-Jan-2015
Endpoints Ch5 67% 50%
Aux. Channel 5 Source SwC
Aux. Channel 6 Source SwD
Mix #1
Mix is ON
Master Ch6
Slave Ch5
Pos. mix 4%
Neg. mix 50%
Offset +17%
I configured my flight modes as follows:
ArduCopter Flight Modes
-
Pos Hold
-
AutoTune
-
Auto
-
RTL
I did make a mistake on the default flight mode. It’s 5 not 6. So, mix the switches on chan 5 not 6. Sorry!
But, the solution is a still a Transmitter one. All you need to do is mix the switches on the Transmitter, any transmitter. Post in the radio thread.
See if this helps:
