Does anyone have a reliable information on how many amps I can draw from the 5V outlet of Pixhawk Mini Power Module?
My PM is square, to power 4 quadcopter motors with whatever voltage you provide, plus it powers PixHawk with 5V stabilized. My airframe is not a quadcopter - instead I have 4 small servos that need 5-6V.
Since I must use PM to power Pixhawk (to read the state of the battery), I would hate to add additional BEC to power my servos from a separate source. I simply have no room left because of the size of the Power Module.
Unfortunately I could not get any reliable info from 3DR tech support so I’m hoping that someone has already gone through this exercise.
3DR tech support just said that drawing 2 amps would be OK, but would 3 amps or 5 amps momentary fry the PM? This they didn’t know.
Why take the chance, and even if you didn’t fry it, if the voltage sags too far, say with a stalled servo, you will get a brown out in the FC and all is lost.
Clean reliable power to the FC is paramount, and in fact, I add a dedicated BEC as a second source just for the FC on all builds (Larger copters) but definitely add another BEC to drive any servos.
Servos are also notoriously noisy which don’t want getting into the Vcc on the FC.
Ha ha ha  ! Thank you Mike.
! Thank you Mike.
I’ll tell you why take a chance: because of no space for even a small BEC.
You could fly inside the plane in your picture - I put mine inside my pocket 
For me the Power Module that comes with Pixhawk Mini is gigantic. It looks like a waste to me to make it support 4 motors with 50A each but not provide 5V capable of 3-5 Amps. 5 well stabilized volts for the rest of the accessories. Because of the size of my airframe the servos are also micro-servos but still - they draw power.
For the lack of space I already eliminated the GPS module and I’m trying to shed more…
I’ll put it to you in plain English: YOU CANNOT POWER SERVOS FROM THE PM. YOU MUST USE A SEPARATE BEC.
Hi,
Is this valid also for the Holybro Pixhawk 4 Power Module?
http://www.holybro.com/product/pixhawk-4-power-module-pm07/
We can not take the 5V out from the ADC 6V6 to power just one servo for a camera trigger?
Thanks!
Dude,
Really? An ADC is not designed to pass a lot of current. The purpose of an ADC (AKA Analog to Digital Converter) it to convert an Analog (Sine Wave) data signal into a stream of data bits that can be used to represent the original analog signal. If the digital data stream need to be “down converted” back to it analog equivalent you pass the data stream through a DAC (Digital to Analog Converter). This is how audio CDs, MP3s and other digital audio systems work. And, besides that, the ADC gets power form the same source as the FC does, the BEC in the battery monitor.
Some times NO is the only answer. Use a BEC and keep your aircraft in one piece.
The info I got from the manufacturer: 2 amps max total.
I measured: Pixhawk Mini+GPS+Safety Sw+ Telemetry: 0.280 A
However considering that even a small servo can momentarily pull quite a current, it is really advisable to use a small switching BEC.
Thanks! Now is cristal clear that we should use BEC.
So, I bought the BEC and wired, but the servo is not working (I checked and Mission planner is showing the changes in Output 7) I show this picture that shows the wiring:
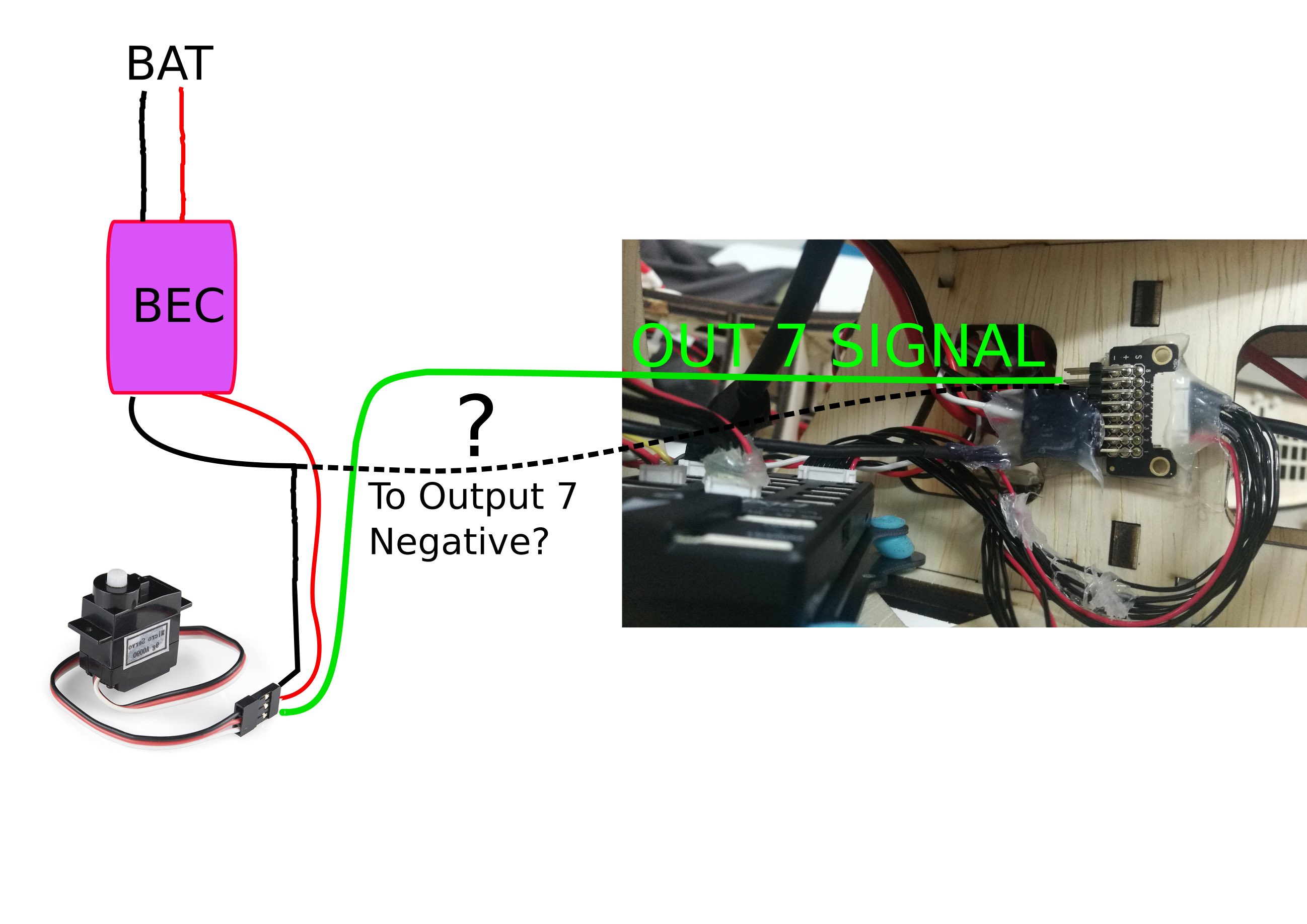
Then, I read here that I should also wire the negative of the BEC to the negative (DC return) of Pixhawk:
(By the way, I’m connecting the BEC to the balance cable of one batery, because I have two 6S bateries in serial)
Then, I made this wiring and some smoke started to came out from the servo ![]()
Should I made this wiring between negative of BEC and negative of Out Bus of pixhawk?
Why the servo is not working?
Thank you so much, I appreciate your feedback.
Regards.
Do you have the batteries in parallel or in series?
Series.
The BEC is connected to one of the 6S battery via the balanced port.
I think I know what the problem is…
It is required that you connect the ground pin, this is called common ground.
I think this is the way you connected the BEC:
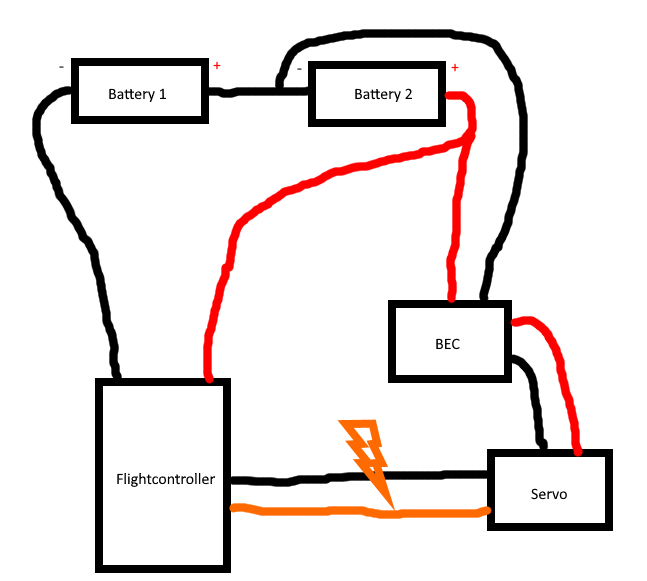
The problem is that you feed the common ground with two different voltages, and that you short battery 1.
The best way would be this (as long as your BEC can handle 12S):
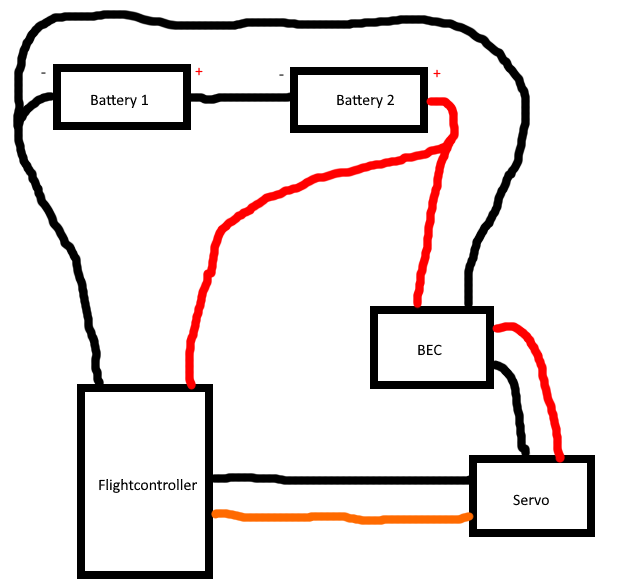
But it would also be possible to connect the positive wire of the BEC to the positive output of battery 1.
I hope you get my point, not really sure if I described it accurately enough.
Thanks @Vabe for your reply!
Thats the point, my BEC only support 6S, this is why I connected only to one battery.
I understand, I didn’t realized that is different to wire to one or the other.
I don’t remember to what battery I wired…
But, as you say, if I connect the + and - of the BEC to the battery1 that have the ground to the PDB, then should be no problem?
Yes, then it should work.
Thanks @Vabe!
Yes, I tested and it works!
I didn’t realized this point about get the wright common negative in batteries in series.
Good to see that the info stays here if anyone have the same problem.
I  ardupilot forums!
ardupilot forums!
That’s not correct either.
The REAL problem is taking B+ and ground from the last battery in series.
What the OP should have done was taken B+ and ground from BAT1 instead of from BAT2.
If you measure voltage from common ground to a point between BAT1 and BAT 2 you get 6S voltage and nothing goes up in smoke.
Simple DC circuit theory… Time to brush up maybe?
I have Pixhawk4 and this power module. I power the BEC for my servo´s from an unused B+/GND soldering point on this power module. As such, the power module still takes into account the total power consumption, and “reports” such to my Flight Controller. I also want “clean” power to my servoc´s and no noise back, but also keep track of my total amperage pulled. With this setup, I achieved that.
grtz
John
Exactly. To get the ACTUAL total current draw you need to connect any external BECs DOWNSTREAM of the power module.