This is my first try putting ardupilot on a 5in freestyle quad. I have built large 50lbs+ quad rotors with a fullsize pixhawk and feel like im decently knowledgable with ardupilot but this 5in has me stumped.
2 airframes, Diatone Roma F5 v2 6s fpv freestyle drones that I swapped the FC on. One got the pixracer and the other got the Matek H743 slim. Both fly and hover but the motors seem to stutter and the quad shakes. The motors and ESC gets super hot just hovering for 30sec in stabilize. The ESC that comes on the roma is a DSHOT1200 bl heli type and I have the MOT_pwm set for the dshot1200. I also went thru the tuning wiki and set the INS filters to the values on the graphs for a 5in propeller.
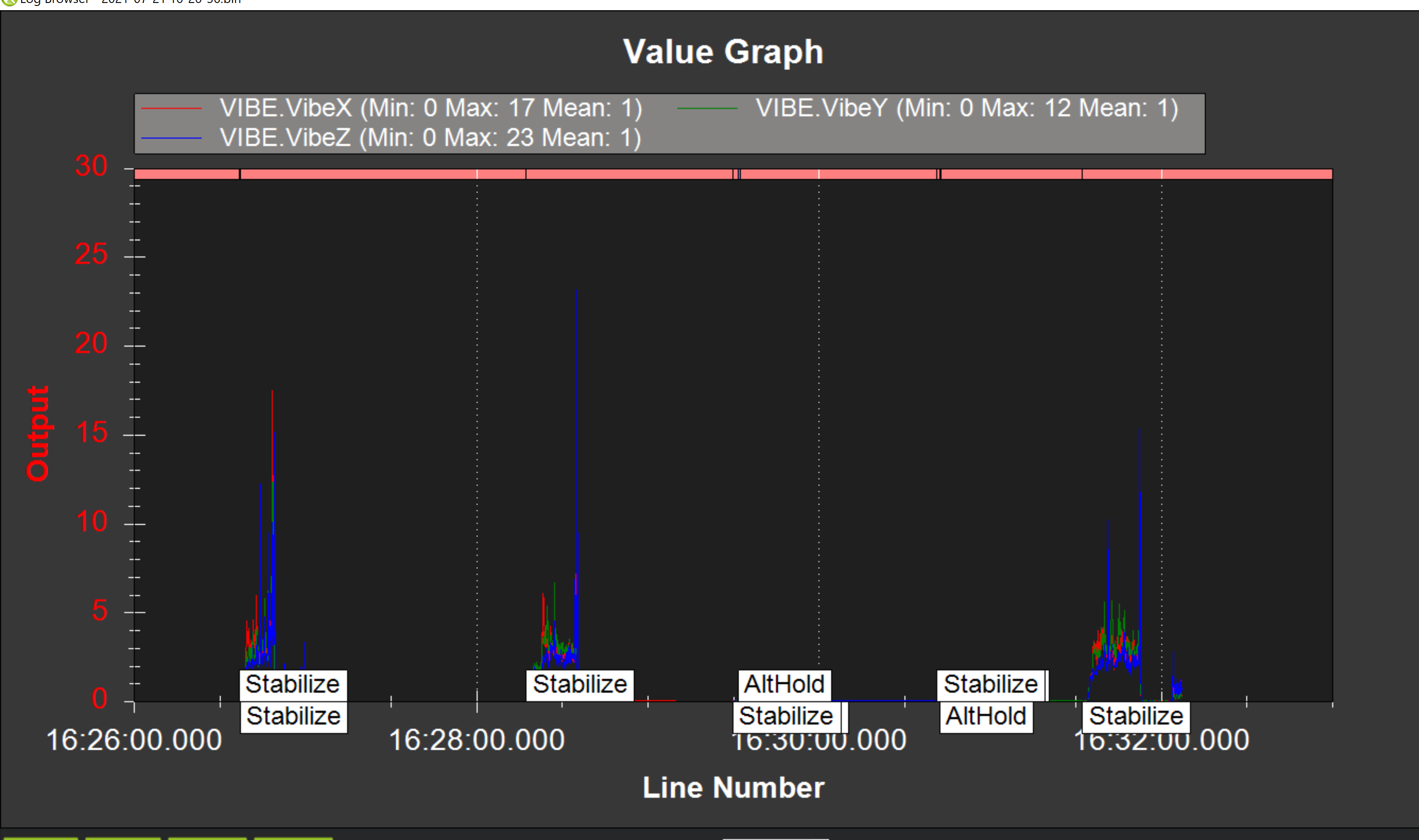
The h743 is not logging but the pixracer is and the vibes are off the charts.
I’ve read a few of the threads over on the 4.1 side about dshot/bidirectional but dont really know what Im reading. Is it a tuning/filter issue? ESC/pwm issue? Not really sure where to start. All help and direction is appreciated
Post a link to a .bin flight log. And what you show is not off the charts. I have a 5" with a PixRacer. And another with the Mini version of that FC. Not difficult to get flying well.
Probably use DSHOT600 , and have you set the initial parameters properly? Press ALT A in MissionPlanner
It sounds like the D term is too high if you started manual tuning
Thanks for all of the suggestions!!!
-logging didn’t work because i forgot the SD card
-notch filtering helped a lot
-cut the PIDs in half twice and the stuttering went away and I can fly it around in stabilize and acro.
Can I use autotune on a 5in?
I have successfully used autotune on larger quads, 15in to 30in propellers.
@davidbitton
following the tuning and notch filtering instructions in the wiki. The notch filtering allowed the PIDs to work properly. Then i autotuned once it hovered stabily