Thanks Chris, I’ll wait for 3.5.4 to be issued, Would this account for missing the RTL by 2mtrs?
GPS can definitely drift by 2 meters. Especially closer to the ground where some of the satellites acquired are closer to the horizon. Sub-meter accuracy is actually not the norm for consumer-grade GPS receivers. Without ground-based correction transmitters (WAAS) sub-five meter accuracy is pretty good. GPS alone does not meet FAA requirements in the US for navigation for full-size aircraft without integration with WAAS (Wide Area Augmentation System). So when flying ArduPilot using the consumer-grade receivers it must be kept in mind that it’s accuracy at best is +/-5 meters, it can fail at any time, and should never be solely relied on without the pilot being ready to take over manually at all times if it fails.
Chris, I was talking to my friend about the GPS, These were his comments, he only files Quads.
I think that response misses the point. The GPS may well be out by as much as 5 metres but we are talking about an error relative to the home position. If the GPS error does not change during the flight, the target for the home position will have the same GPS error as the coordinates that were saved on arming. So it will aim for the correct location on the ground. Both the aiming point and the home location are in error but by the same amount.
I’ve noticed that if I repeat the same mission three times in one flight the recorded tracks are within about 10 cm of each other although they may all be a few metres out on the map.
So I think the flight controller “knows” pretty well exactly where it should land at the home point, but it has difficulty managing both the descent and the position at once. Juggling these two may be too much of a challenge at times, perhaps because of gusts of wind or ground effect. Perhaps helicopters find this more difficult than multi rotors too.
Well, I certainly don’t want to get into an argument over how accurate the GPS is. I am well aware of its limitations, and the GPS used on ArduPilot based systems is typically not a $10,000 certified commercial unit. And even those have problems getting sub-meter without use of ground-based correction. If you are concerned about horizontal position accuracy you can look in the log at the desired vs actual x, y position estimates. The aircraft thought it where it should be. Which means GPS drifted.
It’s not a limitation in the flight controller. It’s a built-in limitation of GPS.
Chris,I don’t want to get into an argument either,I was pointing out what my friend thourght. So I can go and tell him, " It’s not a limitation in the flight controller. It’s a built-in limitation of GPS."
Yes, GPS is a time-based signal in basic terms. The GPS receiver measures the time it takes for a signal to get from a satellite to the receiver, and by comparing with many examples is able to calculate a position. That’s a basic overview. There are various reasons for position “drift” without ground-based correction (such as WAAS, which is used in civil aviation in the US). But otherwise it is subject to all the same interference isssues as any other radio signal. Multi-path signals can cause a consumer-grade GPS to think it’s going 100 mph when it’s standing still (I’ve seen it before). Space weather conditions can totally knock it out so it doesn’t work at all.
GPS is a wonderful thing with affordable consumer-grade receivers in everything from cell phones to cars. But it is not 100% reliable.
OK, so only in theory does the navigation system work this way. You can observe GPS drift with an aircraft in hover - sometimes they move as much as 6-8 feet, depending on the source of the drift, and whether or not a correction system is used.
OK, I would suggest doing a little studying on how GPS works. This is pretty a good piece of information from the University Extension Auburn that illustrates what kind of accuracy to expect from commercial systems (like Trimble, which typically cost $5,000+) using various correction services. Consumer grade hardware, which is what you have on your Pixhawk, is not even close to this:
https://sites.aces.edu/group/crops/precisionag/Publications/Timely%20Information/GPS-GNSS_Drift.pdf
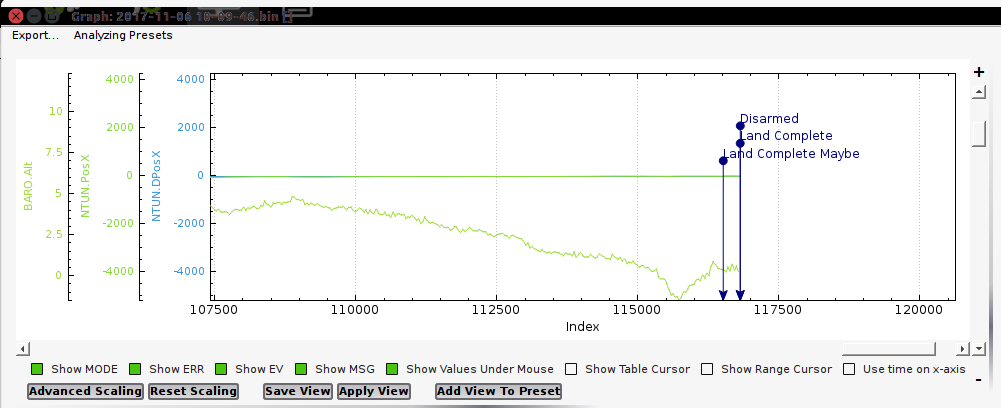
In this case the helicopter landed exactly where it thought it should. This is a plot of the PosX desired vs actual, with altitude included, during landing. You can see there is no divergence of the desired position in the x axis (there is none in y either) vs where the aircraft actually was. If it was 2 meters off from where you thought it should be, that is due to GPS drift.
I can’t stress enough to never rely on automation to fly an aircraft. It’s a great tool to reduce your workload so you can concentrate on running your payload, etc… But when ever an aircraft of any type is being flown by automated systems the Pilot in Command, whether it be a full-size aircraft or a drone, must be ready to take over if the automation fails. I was on a flight not too long ago that I had to abort due to altitude discrepancy of 17 meters due to GPS drift b()rking the EKF. I had to fly the heli home from 1.6 km out on manual control because the EKF altitude estimate had gone bonkers. There was no way it could’ve landed itself. When I finally set it down the system said the altitude was still 17 meters sitting on the very spot it took off from. It would’ve crashed into the top of trees if I hadn’t aborted the flight.
Hi
I’ve removed the gopro size camera from the 550 Heli front leg, and iinstalled a Hobbyking “wingcam” inside the fibre glass cab. I’ts mounted central and solid to the cab. On doing a auto test flight which looked good. When I looked at the video it looks like it was pitching quite a bit.The weather was dull and a little bit windy.
Will reducing the D help this?
It looks to me like that is rolling shutter effect from vibration getting to the camera.