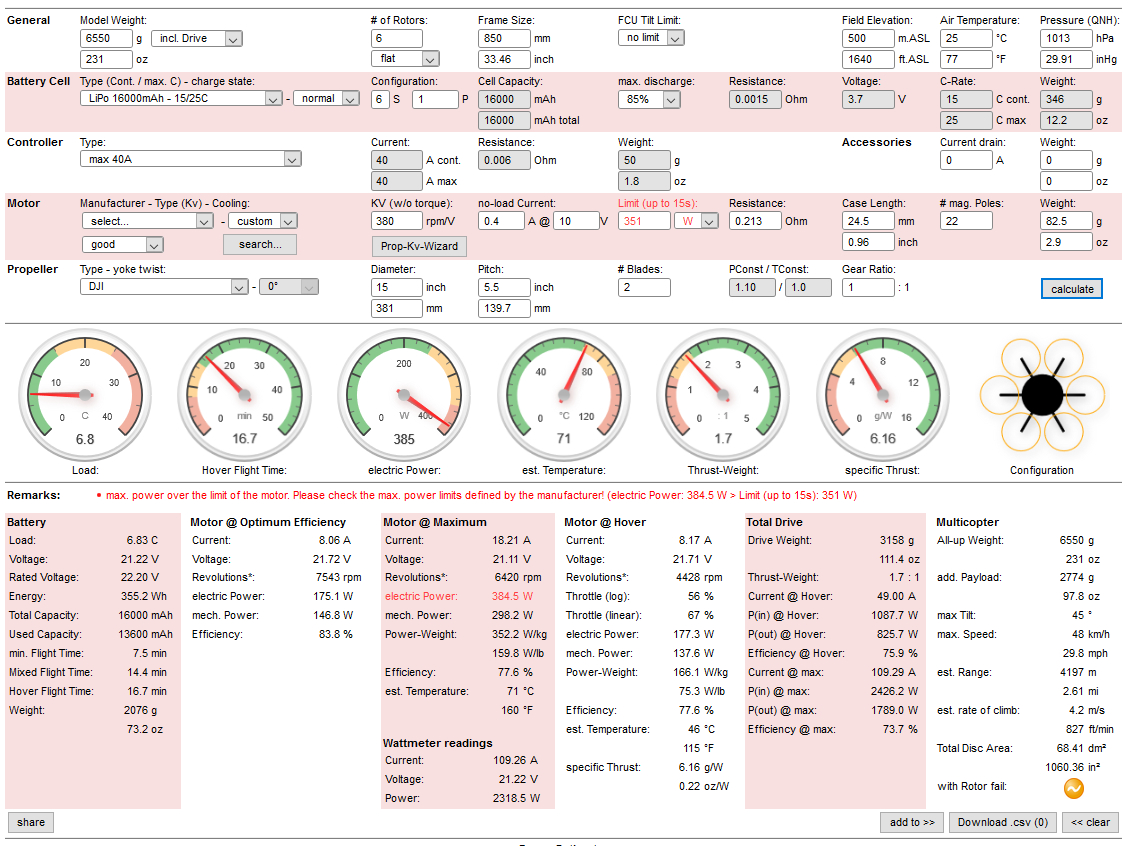
This is my current calibration.
This is my current calibration.
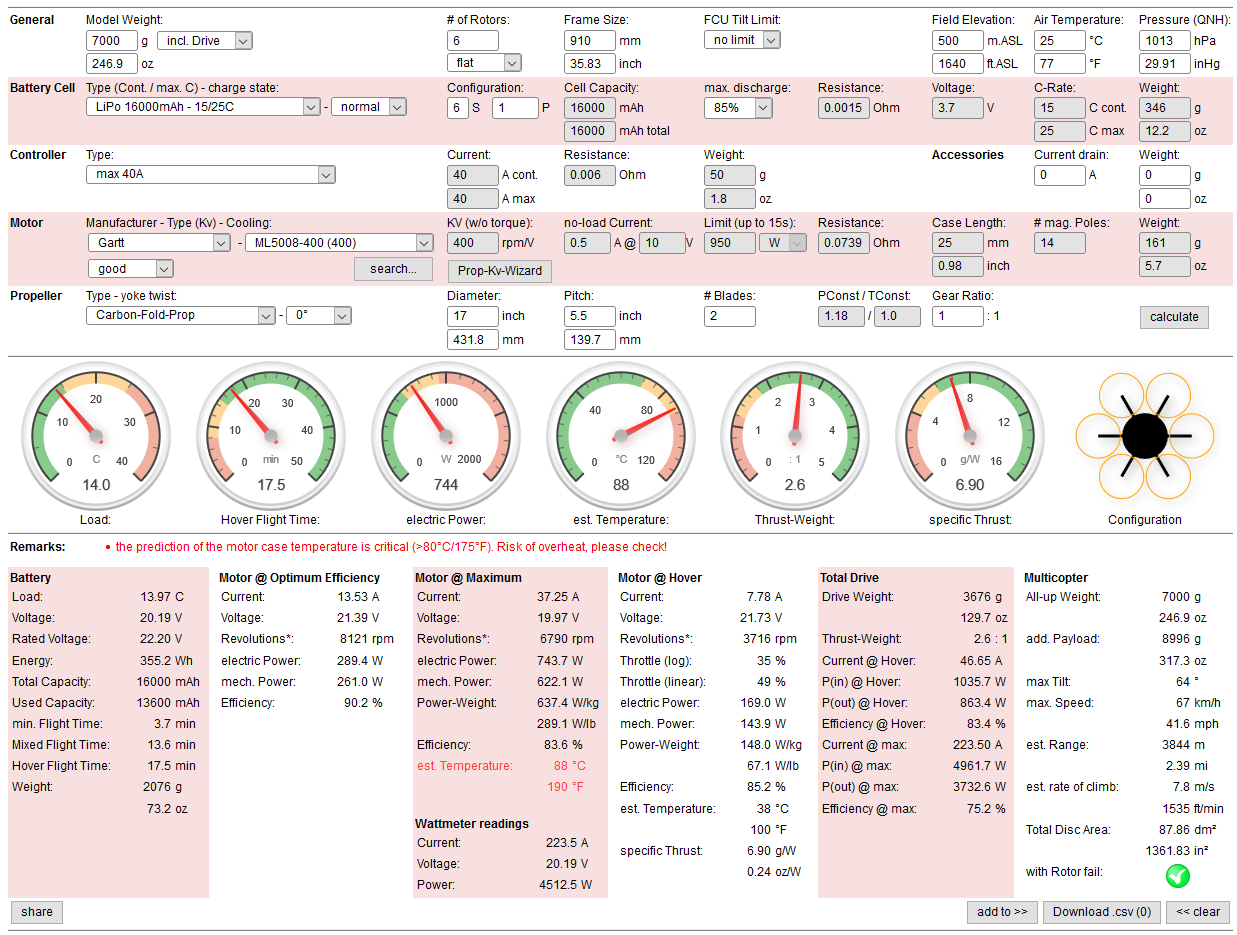
Sorry Pawel, I was joking. I see skepticism sometimes from peoples opinion of eCalc but I find that when good inputs are used it’s very close to actual. In this case and with @alberto.munizaga it seems to be predicting a bit high for hover current.
I calibrate the power module amps/volt setting using current consumption logged vs. actual from re-charging and tweak the multiplier. This seems to work very well.
Be aware my setup its a quite diferrent, 4010 370kv motors and 16" props. Those 5008 with 15" motors must spin faster to get the same thrust that I get.
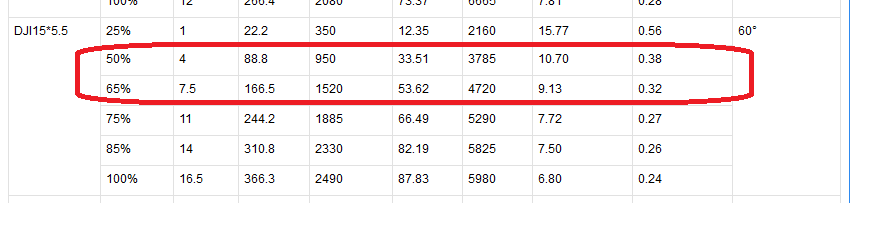
I used 380kv in eCalc for yours so probably why the hover current was off.
I have to recalculate it. Is it better to replace the motors with 4010 and leave the 15 “propellers, or extend the arms, leave the 5008 motors and buy 17” propellers?
Hi @ZDRONA ,
I also have this same frame but don’t have chance to build a Hexa. I have idea how to solve your problem, very efficient way, cause you don’t have to extend the arm while using 17" props. I believe this method will work, but to be honest, I never done it (combination propeller position) before, so please be careful when you do the first test. The idea is to install the motor/propeller in combination between “normal top propeller” and “upside down propeller”. In this installation method the adjacent prop. will not touch each other. But you have to pay attention about direction of rotation of the “upside down motor/propeller”. The logic should be correct. I have built medium quad (17" props.) with propeller in upside down position and it worked well. DJI also have this kind of drone. Good luck…
If you want to use 17" prop. for better efficiency, you should either change battery to be 5S or 4S, or same 6S battery but with lower KV motor.
great idea! My head just explode… how I didnt think about that…  I never had try this, but I will as soon I have the chance.
I never had try this, but I will as soon I have the chance.
If you change the motors for a 4010, you will have several advantage, ths first one is you will lower the total weight. The Gratt weight 161gr, x6 you will have 966gr just on the motors. With the arris motor, each otor weight 82gr, x 6 =492gr, so just changing the motor yuo will have 474gr less. NOw you have a 6,5 kg drone, not 7kg.
this is the specs for that motor
I use those motors form a long time, and are very good.
I have information from producer about ARRIS 4010PRO 380KV:
Idle current (10s) 0.4A @10V
Weight: 82.5g
Configuration: 24N22P
Max Power: 351W
Resistance: 213 mΩ
Size: 45.3x24.5mm
I think, Gartt 5008 with 17" props is still best option in my case.
let us know your results! good luck!
Have you measured the voltage of your charged lipo with a multimeter, then adjust the battery monitor on the drone to make sure they are calibrated?
I was getting 15mins with one of my drones, did the above calibration and now getting 30min!
No magic here. 16000mah battery with 50A hover.
((16*.85)/50)*60= How many minutes? And this is just hovering.
Finally, I was able to lengthen the arms of the frame. The spacing between engines was 850mm, now it is 1000mm with 17 "propellers. The current consumption has dropped even by 8A!
Here’s the log from mixed flight:
https://drive.google.com/file/d/1BqychiHBDOjzmf9tDzgbZIJMPzcVEfYi/view?usp=sharing
So far so good, it needs tuning now. I would increase the rate filters to 13Hz, configure the Dynamic Notch Filter, Set this back to default (0.1) AUTOTUNE_AGGR. Then run Auto tune.
Thanks for the advice. I put a photo from the drone on the disk, if you want, you can see what I will be using it for. I have to wait with the autotune because I ordered the T-motor propellers, now I use foldable Tarot propellers. I would like to choose the better ones and close the topic of balancing propellers.
To be honest don’t trust this charger , because this charger not accurate