I have seen documentation on PixHawk Supporting VTOL config.
How would Pixhawk handles the 5 motor config?
I am familiar with the H frame 4 motor config.
Channel 5: Front right motor, counter-clockwise
Channel 6: Rear left motor, counter-clockwise
Channel 7: Front left motor, clockwise
Channel 8: Rear right motor, clockwise
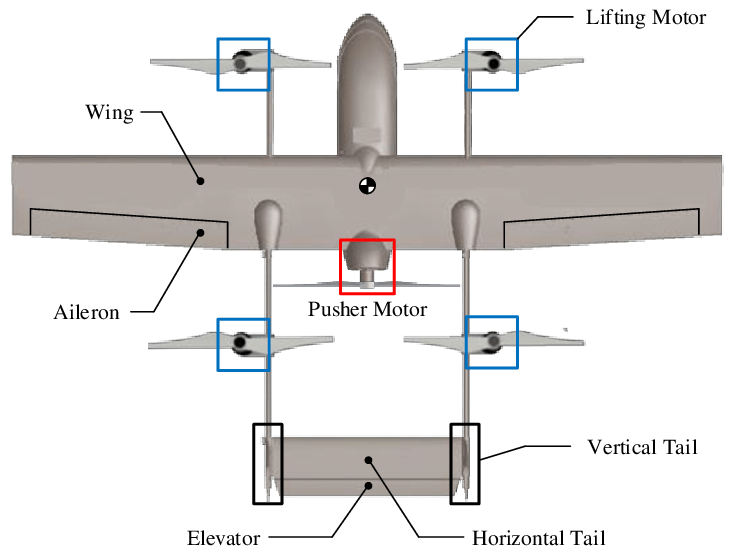
What about the pusher motor?
How do you control that via Tx?
What port on Pixhawk do you plug the pusher motor?
How do you turn off the 4 x H frame motors once the plane is in transition mode?
Sorry, I’m no expert with ArduPlane but have been following several forums on the quadplane development. I actually use PX4 and have successfully built and flown a few conversions. Having said that, I’m hoping to point you to the right direction. @GregCovey has done a few and you could look at his Ranger setup.
If you want to give PX4 a try, you can look at the preconfigured VTOL airframes and probably the QuadRanger would be compatible with your project. Samples of my builds:
How do you control that via Tx? The Pixhawk motors are controlled by the QuadPlane Flight Modes.
What port on Pixhawk do you plug the pusher motor? Plug the pusher motor into the normal throttle port. The default outputs are shown below but they can be defined to whatever you want using the SERVOx_FUNCTION setting.: More information is here.
Typically:
servo output 1 is aileron*
servo output 2 is elevator*
servo output 3 is throttle*
servo output 4 is rudder*
How do you turn off the 4 x H frame motors once the plane is in transition mode? The H-frame motors are turned of automatically once the appropriate speed is achieved. This is set by the ARSPD_FBW_MIN parameter.
What special parameters are required to be set? Follow the QuadPlane Frame setup guide in the APM Wiki. Use the Q_FRAME_TYPE parameter to set X-frame or H-frame.
Is there a step by step guide available? Yes, see the guide above.
@GregCovey@rollys Thanks guys…highly appreciated. This gives me a good start.
@GregCovey - watched your Ranger EX videos and mods…Impressive and nice save by the way
I have one ranger EX as well and really don’t like this plane. Mine won’t even get off the ground as it has become nose heavy after I put on all the gadgets. Are you using the 4S or 3S battery and what amp?. I just finished replacing the stock motor.
for VTOL I will be using a completely different plane.
Thanks! My Ranger EX was one of my VTOL experiments that failed. I did not like the size and awkwardness of the final VTOL design and did not get it to perform properly a few years ago using the initial APM VTOL firmware implementations. Since then, I have configured my Ranger EX back to an APM plane and it works perfectly as a long range flyer but it does require a runway. You can read about my initial setup here and here.
The stock Ranger EX power system was adequate but required a relatively long take-off when loaded with a big LiPo pack and camera.
I upgraded to the Turnigy SK3 3542-1250kv motor with the same prop and 4s 8AH battery but using a heavy duty 80-100 amp ESC. This combination provides 746 watts at 51 amps using the same 10x6 prop. It gives you just enough extra power for take-offs and still sips the current during normal flight. The larger ESC stays cool inside the fuselage.
So where did my quad power system for the Ranger EX go? Into my FX-79 QuadPlane. It also uses the same forward flight power system as the Ranger EX. The FX-79 initially gave me problems with tucking but they seemed to disappear after stiffening the wings and flying in reasonable winds up to 15mph. The FX-79 breaks down quickly and is easy to transport in its box frame.
The APM firmware has matured nicely for VTOLs. It is feature-rich which also comes with its share of parameters.
Yes, Ranger Ex is a pain in the butt to get it off the ground. I will give it shot next week and see what happens with the new Turnigy Aerodrive SK3 - 3536-1200kv Brushless Outrunner Motor and a new ESC using 4S @5200 mah.
I have found a precision landing solution for drones from IR-Lock so I will it use it inside the VTOL and lets see if I can land it pinpoint to the target. That’s my goal. VTOL for delivery and precision landing.
Its for a commercial application I am working on. So the above plane is just going to be a Ginny pig for initial testing and lessons learned. We are designing our own V-TOL, a very unique design I will share details once the product is ready.
Are you attending Inerdrone Sept. 4 to 6?
p.s. is there a reason you used a washer for the motor to give it few degree up?
I don’t attend any conferences. I am recently retired as of a month ago and just play with VTOLs for fun.
The stock motor mount on the Ranger EX has insufficient upthrust. If you read the rather long RC Groups threads on the Ranger in the FPV Planes forum you’ll see the recommendations. As for the washer, it was a simple solution without paying for a 3D printed mount. You’ll find many 3D printed motor mounts are available for the Ranger.
Is it safe to assume that the front and back motors should be of equal distance from the plane CG “or” the front and back motors have to be at equal distance from the wing leading and trailing edge? Whats the math behind motor mounting and distance…Just doing some due diligence upfront.
When it comes to quads, you can have some the following possible frame types;
The reason for making the motors equal distant is mainly for keeping the CG intact. Some planes don’t allow you to move the flight batteries to compensate. Adding balance weight to the nose or tail can be done, if needed. Keeping the motors equal distant from the CG also allows for them to have equal force but small variances can be tolerated.
All the frame types will work. We haven’t seen much different between X and H frames other than perhaps a change in yaw control. I’ve used both without issue. The difference is in how the mixer treats the spinning motors and their directions.
Simply type “QAUTOTUNE” in the search window of the Main ArduPilot Discussion page and you will find your link. This also works within each thread.
Remember to reboot the Pixhawk after you enable Q_ENABLE and all the Q parameters will then be displayed. Follow the WiKi as it has been nicely updated.
Hi @GregCovey i am searching for Pusher Motor Setup .I am new to these things, thanks for your help. I checked the WiKi (Quadplane Frame Setup) but couldn’t find exactly information about pusher motor. Can you guide me about it.
I’m not sure what your vision is for a pusher motor setup. From a quadplane point of view, using a tractor or pusher forward flight motor is the same setup.
I am also currently building and VTOL and have set up my 4 quadplane-motors aswell as my 1 horizontal-motor as described. Everything does work except for the Servos.
I am using 3 Servos:
1x elevator
2x aileron
No rudder
I am using a Holybro PixHawk 4 with the Holybro PM07 V2.2 PDB and a Graupner MC-20 Transmitter + Graupner GR16 Receiver (SBUS). The Servos are supplied with 5V from the horizontal motors ESC-BEC.
Servo Output is set as followed:
Servo output 1 is Throttle
Servo output 2 is Aileron
Servo output 3 is Aileron (since I wont use a Y-cable)
Servo output 4 is Elevator
Where do I have to connect my servo signal wires to?
Do I connect them to the M1-M4 connections on the PDB, or can I use the FMU-PWM-out Ports?
Although I never used a Pixhawk 4 before, my guess would be to use the I/O PWM Out ports. The FMU-PWM Out ports are equivalent to the AUX ports on a Pixhawk 1.
thank you for the fast reply!
I connected the signal wires of the 2 aileron and single elevator Servo to the free “M-Ports” (M2, M3 and M4) on the PM07 V2.2 PDB and I now do have control over all of the three servos in all flight-modes:
QSTABILIZED
FBWA
QHOVER
Since all the 5 motors and all 3 servos seem to work as the should I am now going to put the electronic into the plane and finish the build.
I’ve connected the signal-cables as described in my Post on March 17th 2021 and the VTOL Quadplane works great.
Thank you once again for your fast reply and help Greg!
The current quadplane-setup uses a Holybro PX4 FC and a Holybro PM07 PDB.
Additionally there is a Holbybro digital pitot-sensor and the FBWA_MIN_AIRSPEED is set to 14m/s.
This has been working perfectly for now and very quick and rock solid transitions are possible either way!
There is plenty of power in vertical flight, but the horizontal flight works fine aswell, eventhough the Skyhunter-VTOL has now a weight of 3900g.
Used Flightmodes:
Q_STABILIZE
FBWA
Problems:
When all four motors are engaged for vertical take-off/landing there is an EKF-Error.
I think the compass gets interferences since there is alot of current being pulled from the battery in vertical flight.
No Problem in horizontal flight tho!
I couldn’t tell by your photos but most folks usually mount the GPS/Magnetometer outside of the fuselage and also disable the internal magnetometer of FC to eliminate/minimize interference.