I’m having a little trouble understanding the pin connections between my XROTOR 65A and my pixhawk.
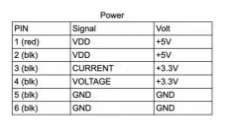
i see the pixhawk power port has 6 pins
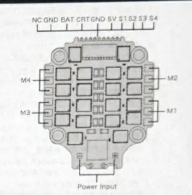
the xrotor has 9 pins, 4 of which go to the motors control.
i have a few questions.
why does the pixhawk power port have double 5V inputs and double GND?
what are the 3.3V voltage and 3.3V current pins for? and do i need them?
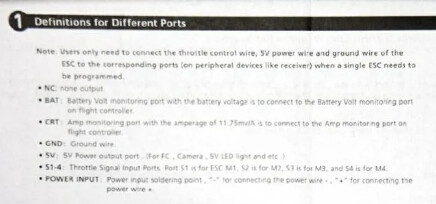
do i need to connect the BAT, CRT from my ESC to the pixhawk and if so where to?
finally to sum it up… what’s the pin connection i need?
The only connection to the Power port would be CRT (current) from the ESC to the Current pin of the port and ground. DO NOT connect the BAT pin on the ESC to anything on the Pixhawk.
You could use the 5V output from the ESC to power the Pixhawk if you wanted to but you won’t have any Battery voltage monitoring which you really should have. The Power Module provides both Current and voltage monitoring.