Hi, looking to get some clarification for wiring for a project i’m working.
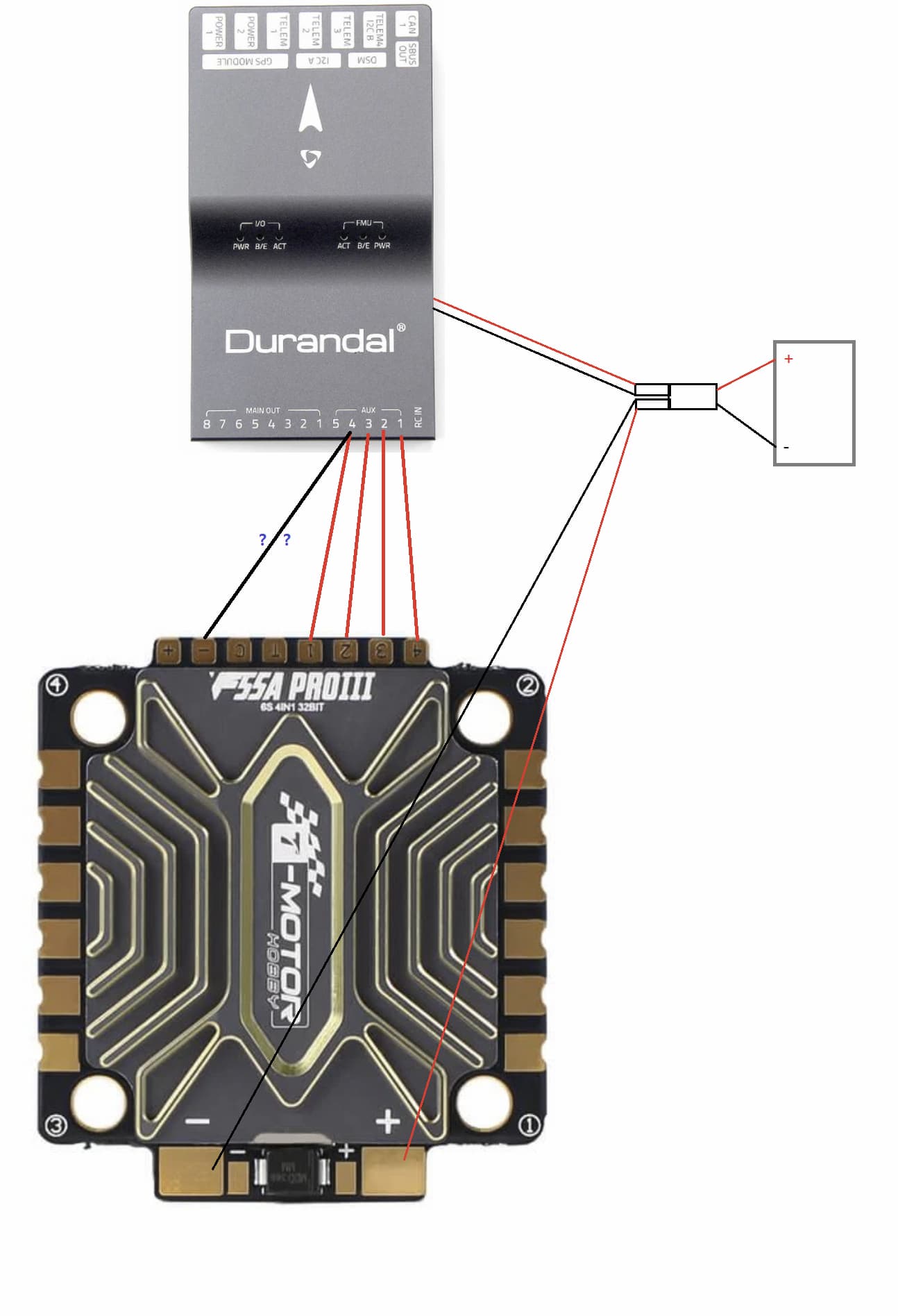
Have a 4in1 ESC on the way, Tmotor F55a Pro III and I have a holybro durandal FC. There is no manual or wiring info for the 4in1 ESC from the MFG, likely it is straight forward if you use a stackable flight controller, but in my case I’m not using a standard FC, so I need confirmation.
The ESC and FC will be powered by one battery with a XT60 splitter. I understand pins 1-4 on ESC are for each motor and connect to the FC. But does the Ground pin need to be connected to one of the 4 motor connections ground pin to the Durandal FC ground rail or can it be left out?
I’ve read it can be ignored, does not need to be connected, and others have said it needs to be connected. Trying to understand if it is absolutely needed.
I should mention i have another ESC for a single motor that has a BEC, this does not have a BEC output. That will also be connected to the Durandal along with this 4in1 ESC.
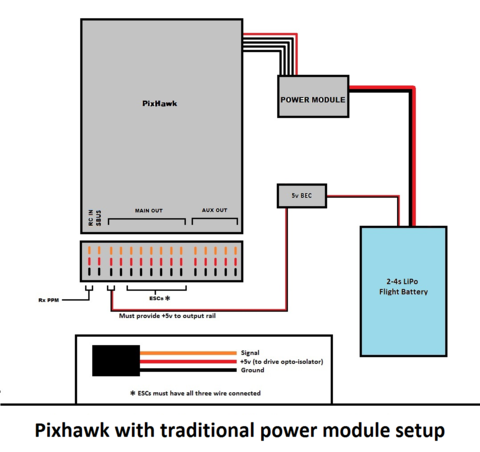
You are correct, i have the PM02 it came with my complete durandal kit. The diagram is incorrect in that i didn’t show it in there, but I’m using a splitter to power both the durandal and 4in1 ESC at the same time.
Back to my original question, is that ground required to the ESC ground rail from the 4in1?
Yes, minimum one. you need both separate systems to “sync” the level correctly.
The external power module supply power to Durandal is not “sync” with the ESC, if your ESC comes with BEC + provides power and modulation info to Durandal, then maybe the ground pin for the motor connection is not needed. Even though, connecting the ground will be advised as we do not know the circuitry inside, analog ground, digital ground plane, etc.
It sounds like I still need to connect this ground despite the lack of BEC on the 4-1 ESC. Correct me if I’m wrong but since the AUX ports from the FMU don’t have power b/c the positive rail on the main is not connected to the Aux ports than there is no power on the Aux (+) pins. In that case would the signal wire alone not be sufficient for the “sync”?
I’m not familiar at all with 4-1 this is my first so excuse my ignorance.
Both modules the FC and the ESC needs to have the same GND. That is essential
The FC got this via the the PM from the battery and the ESC got this direct from the battery. So in this case no GND from FC Servo Output to ESC Servo Input is absolutely necessary but for better signal quality it is recommended.
As I can see on the Datasheet of the ESC a BEC (10V@2A) is available on the signal connector.
Yes, it needs to be connected. Otherwise you get ground bounce, and the copter might simply crash. The people that say that it is unnecessary are not electrical engineers. If the GND pin would not be needed it would not be there in the 4-in-1 ESC, would it?
Great conversation guys. I will be adding the ground to the FC rail.
@Jai.GAY - Tracking, my perspective is that the analog plane is already established by the PM02 to the FC and the connection to the 4in1 ESC via power poles from battery.
This is ground would have to be a digital ground output from the ESC.
@Juergen-Fahlbusch - I’m tracking the analog ground plane being established, this is why i began to question if the digital ground was required. Certainly it can’ hurt to add it.
Here is where I have a little confusion based on the feedback Tmotor customer service provided.
They stated the +/- signals pass along the battery input voltage direclty to the FC. I have no experience with stackable Quad flight controllers so it is foreign to me b/c this is not traditional for FC i have used for planes.
If what tmotor customer service is saying is true, than the (-) ground pin is not really a digital ground plane as i’m sure there is continuity to the analog input. If it was a BEC than that circuitry would be likely a digital output, however the spec states no BEC and tMotor customer service confirmed this ESC has no BEC.
Also you stated you can see on the datasheet of the ESC a BEC (10V@2A) can you please link the datasheet b/c I have found no information at all about a BEC on the Tmotor or Lumanier websites. The Tmotor spec states BEC:no and the other doesn’t mention anything. If you can please provide a link that would be great.
@amilcarlucas - I concur with your statement. My apologies for not being clear, I’m not using this in a coptor or quad application. Pertaining to the ground pin for how that input voltage is passed to the FC which if i understand the quad/copter FC have built in BEC it makes sense to connect that ground pin. But in my application it is not being used in a quad/copter setup. This is why the question came up if the ground was required and as you can see I have more questions now than answers.
Looking forward to this constructive discussion and feedback from you experts on these 4in1 ESC pinouts.
By the way, are you electronics trained?
Do you know why in smart devices or electronic board with many inductance or power amp, electronics designer need to separate or shield the analog and digital ground? What will happen if users go and tap analog ground for digital signal?
Yes I’m, there is more than one way to regulate the voltage, I’m not familiar as I said with the quad/heli ESC or FC’s, I just assumed based on the vague info tmotor customer service provided the regulation was on the digital side via a DC-DC step down like a buck or similar. If it’s purely a linear analog regulator thats common for a BEC but that would not coninside with the feedback customer service provided by stating it just passes through the analog voltage. Hence my confusion on what those pins are exactly.
I agree with your statement on seperation, but without the schematic to know how it is designed and the gerber files it is difficult to say without a doubt it is sound, i’ve seen stranger designs coming out of China on non regulated consumer electronics. I’m assuming you are a EE so you know how sometimes common sense design doesn’t always translate.
I’m already powering it up via another ESC which has built in BEC, I would suspect connecting the positive input to the rail from the 4in1 could damage something possibly. Not sure if the voltage is somehow regulated to proper voltage for servo requirements. I would suspect on quad/heli FC the BEC handles all that for the rails, but on this durandal or similar Cube it would not play nice and fry something. I have not played with the durandal yet, it’s in the box.
Do you know the objective of the development team for the servo rail input voltage?
Is it just for I/O? “I/O will accept power from the servo connector up to 10 V FOR MANUAL OVERRIDE.” For Cubepilot, meaning, I can supply 10V to the Cube servo rail (Main Out or Aux) for some I/O operation.
by searching the forum, quite many discussions and no clear usage intention.
{kind=link}