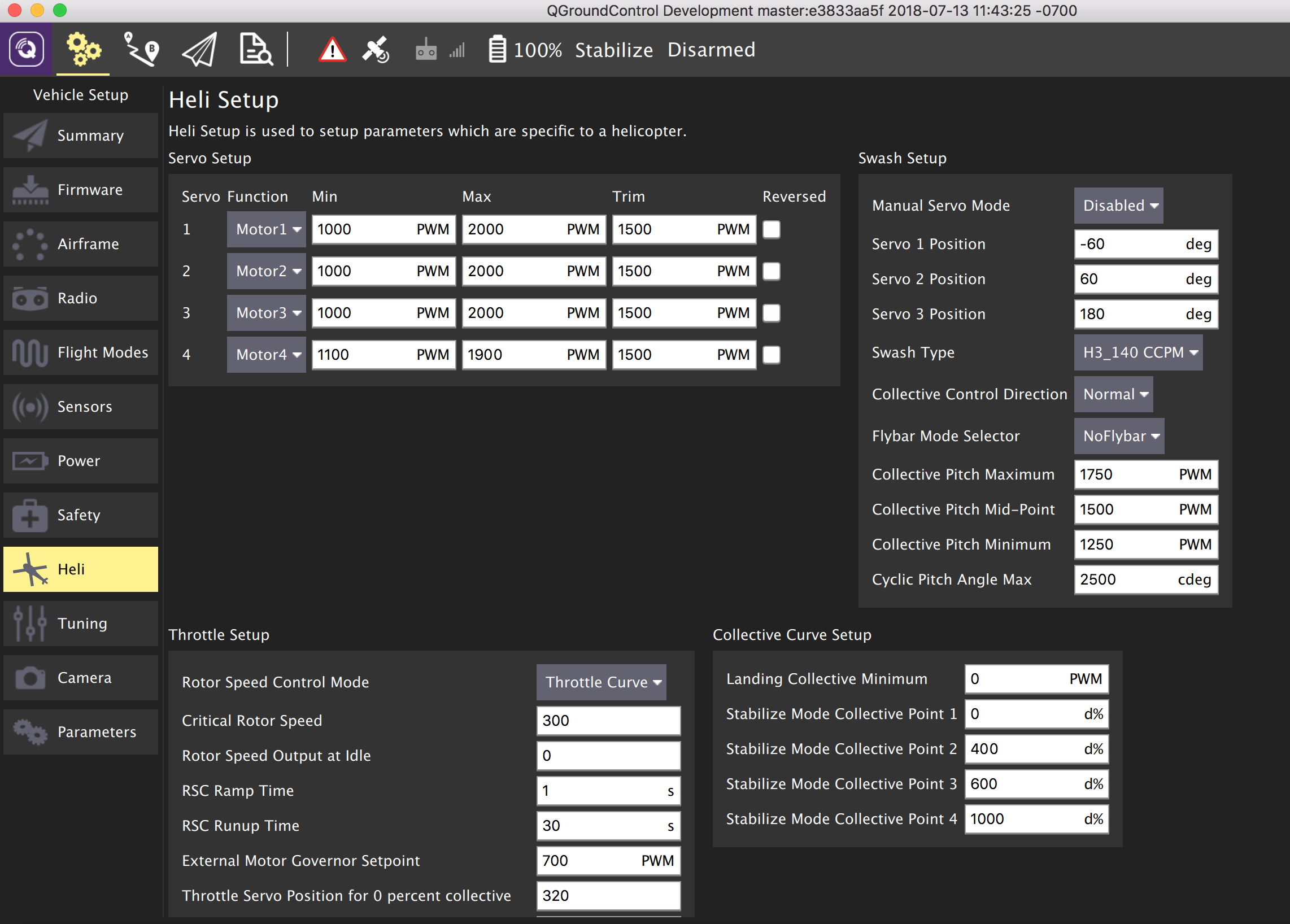
After some insight as to how i’m progressing with the tune of my 450Pro with a pixracer board on it and AC 3.5.7.
It feels like it is locked in during manual modes but i started tuning the I gains today whilst flying through some auto missions. It has been windy all this week so i’m struggling to find clean air to do this in.
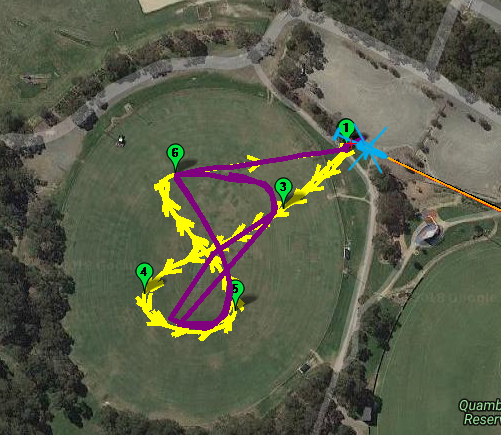
The Picture above shows my mission. First off, why are the waypoints not being hit consistently? My WPNAV_RADIUS param is set to 100cm so i would have thought the bird would fly straight through a WP using splines then turn smoothly to continue on. Some of the waypoints it goes through then appears to Jerk back to get onto track with the next WP.
Onto I Gains. I really need some conceptul help just to kickstart my proper understanding of how the parameters interact.
Let’s just talk Roll for a second.
ATC_RAT_RLL_I - Corrects for long term errors and accumulates each cycle.
ATC_RAT_RLL_ILMI - is the minimum amount of integrator that well get leaked off when below 5m/s forward flight. ie hovering.
ATC_RAT_RLL_IMAX - I need this explained to me in regards to how it is implemeneted. I had a browse through the code but my C++ isn’t up to speed and knowledge of the project isn’t there either. ATC_RAT_RLL_IMAX appears to be a percentage. So how does this percentage affect the ATC_RAT_RLL_I? ie if ATC_RAT_RLL_I was .5 would an IMAX of .5 (50%) allow it to grow to no larger than an additional 50% so .75?
if i set ATC_RAT_RLL_IMAX to 1 like the tuning instructions state, i’m a bit confused by the following. “In the pitch axis this is set by the integrator error required to hold the aircraft attitude at high forward speeds. The starting value is 0.4. To check this set the value to IMAX = 1, fly the aircraft at the maximum desired speed. Pull the log and look at what the maximum I value is in the PIDP message. Set IMAX for 0.1 above the maximum value.” When i looked at the logs. the PIDP.I value was around mak of .0012 so based on that should i be setting the IMAX to .1 abouts for each axis based on that test?
In my logs attached below. I can see that i’m not tracking with desired Roll and actual roll and Pitch either. Yaw is locked on nicely (i think). So do i continue raising the integrator at this point? seems i’m getting rather high values here. Up to .4. Is this indicative of me being to cautious of the other Terms somwhere. My VFF values seemed very low but these were the point that the logs lined up with the PID terms set to 0 on Roll and Pitch.
Good to see the work you’ve been developing. However I would recommend that perhaps you should start looking at the 3.6 version. Although, still as a Release candidate there are some great improvements, and also an excellent work from the new TradHeli maintainers where there are some default parameter values that work very very well right out of the box. Try the RC6 with the extra parameters that will be the default for 3.6.
I had 3.6 RC6 on the pixracer board last week. It has compass issues at the moment which i couldn’t seem to work around. It certainly looks like the whole project is taking a big leap forward.
I look forward to Helis being taken down a path of solidarity, in another post i had made mention to the fact that there shouldn’t be any parameters for other frames present in the Heli branch if they don’t do anything. Simerly i’d love to see the mission planner interface embrace the tuning of Helis. The setup section is great to have but needs to get towards tuning also. Down the roadmap i’m sure the autotune function would be a great place to end up in this respect so that it opens Helis back up into the market where complete newbies can fly them (which i am) but i can fly my Heli without arducopter, so i guess i have that going for me!
What were the logical steps to troubleshooting the mag issues on the pixracer? I’m only learning this platform at the moment so would rather be flyable than bleeding edge if you know what i mean.
Hi all. This discussion went quiet so I did some digging in the code. Mission planner reports the IMAX Param as a percentage. I can’t see reference of this parameter being much more that a hard limit rather than a percentage growth or anything like that. Ie set it to .4 and the I term can grow to .4 in dynamic flight. Have I come to the right conclusion here on my own? Where does mission planner derive the units from?
1st: What hardware is involved ? You mention a PixRacer but what is connected to it? GPS, Power module, etc, ? How it is mounted?
2nd a log file (bin) is essential to help to debug this