Hello its been moths since i am trying to get this heli to fly properly its flys ok in stablize mode but does not seems to hold pos in loiter mode and starts toilet bowling i calibrated compass multiple times and gps seems to fine i used this this exact same hardware on my other quad worked flawlessly everytime but not getting lucky in this case anymore i will post my bin files in a bit
2022-05-18 18-54-00.log.param (18.3 KB)
Here are logs and param files 2 log files one after recalibrating compass please have a look at these
Hi @goobisoft
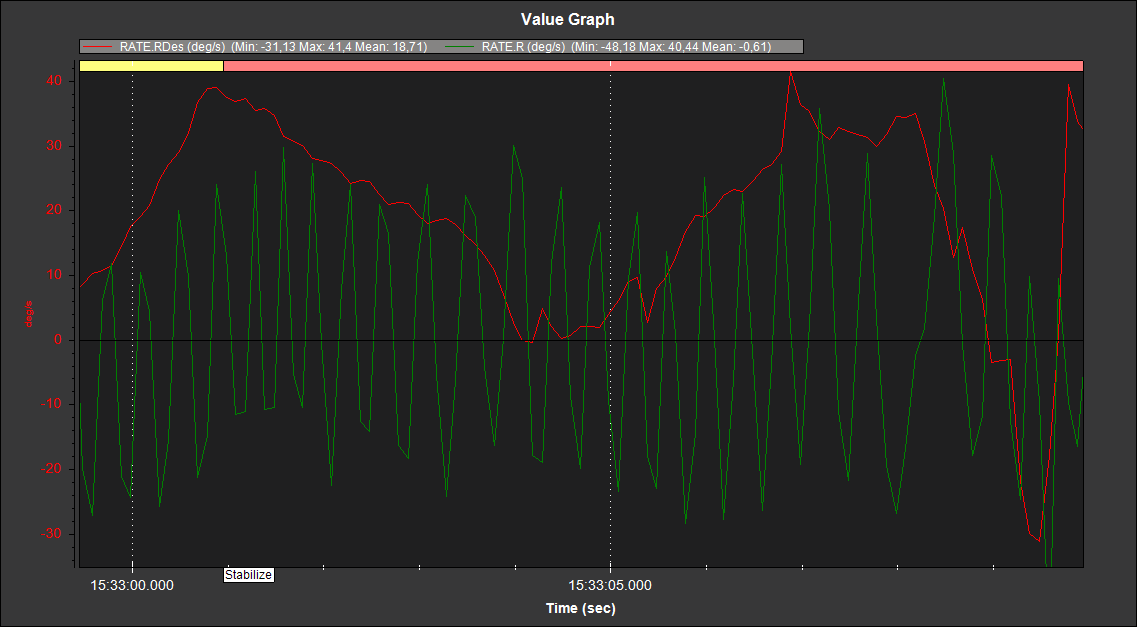
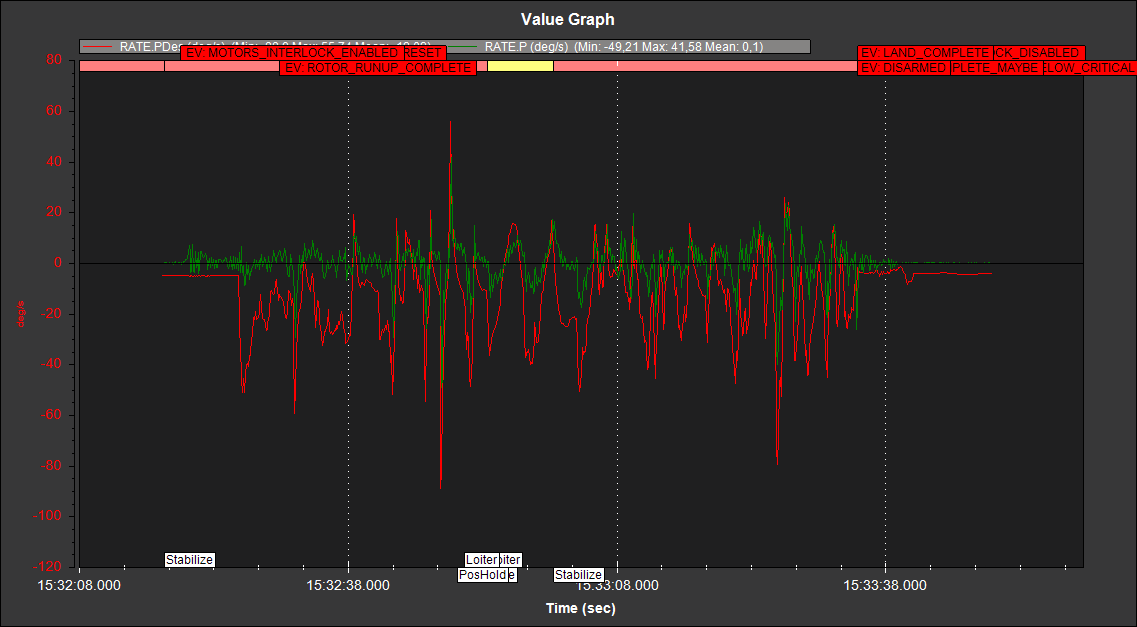
I am not the best analyser in this forum, but even I can see that your rates are not following your demanded inputs. Did you tune your _FF _P and _D rates, as told in the tuning wiki?
BR
Heri
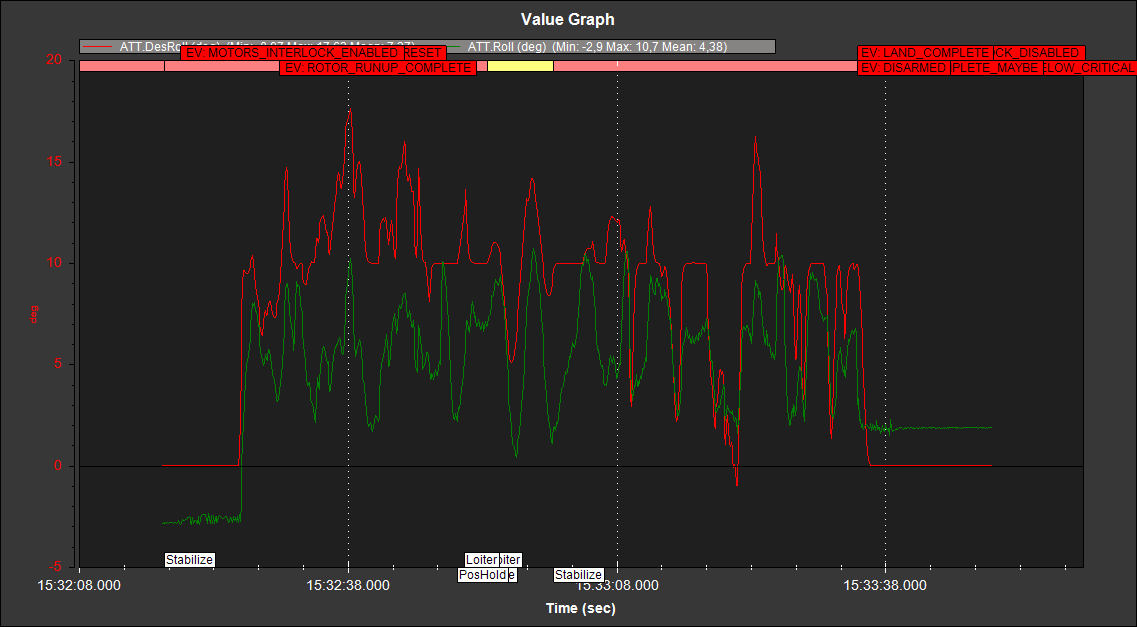
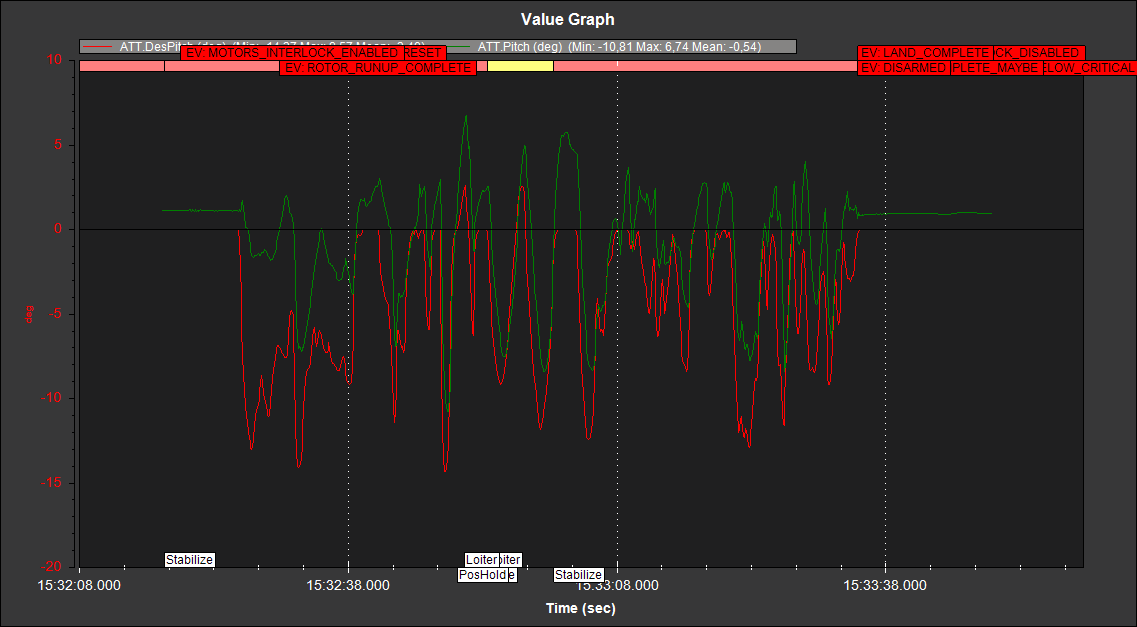
And your mean values of the attitudes should be around 0 degree.
For me it looks like your point of gravity and/or your level trim of the swashplate is not ok
@goobisoft I agree with @heri regarding your rates and attitudes not matching the desired values.
here are some things I noticed in your setup.
first you set the H_FLYBAR to 1. This really only affects the acro mode and gives more stick to head control. I don’t agree with using this setting for flybar helicopters. So I would recommend setting this to zero.
Next I would recommend you set the Harmonic notch (INS_HNTCH_ENABLE) which you can find directions on the wiki. I can’t tell if your oscillations are feedback instability or rotor vibrations because the sample rates are too slow.
Now looking at the attitude controller (ATC) parameters. First I noticed that you have ATC_RAT_RLL_P, ATC_RAT_RLL_D, ATC_RAT_PIT_P, and ATC_RAT_PIT_D as non zero. If you have a flybar on this heli then these should be set to zero as the flybar is providing the stability. I think this is what is causing the oscillatory behavior seen in your rate response.
I also noticed your ATC_RAT_RLL_I, ATC_RAT_PIT_I terms are very low. It appears you set them equal to the P term which is not appropriate for helis. You want to set them equal to your FF term. along with that you want to set the ILMI terms for Pitch and Roll to 0.08 to allow the integrator to help match the actual attitudes to the desired values. I think this is the bigger issue with the loiter control.
Also once you fix the I and ILMI term, you will have to reset the ATC_HOVR_ROL_TRM value. I guarantee your heli doesn’t hover 10 deg to the right. From the plots above, it looks more like 4-5 deg.
Please read through the wiki and follow the new tuning guide. Or you can load the latest stable version (version 4.2.0) and try the autotune. Please take the time read through the instructions and watch the videos. That will hopefully answer your questions and help you be successful.
1 Like
Hi, thanks for reply i actually solved the problem a different way and now the toilet bowling is gone after tunning different parameters(l
PSC_POS_P -
PSC_VXY_P-
PSC_VXY_I-
now it loiter rock solid but if I move from loiter to pos hold it will wander around or maybe toilet bowl
But loiter seems enough to me at the time but if I want it t do circle mode or RTL i think i have to have better attitude control
Here are my params and will upload logs soon ASAP with some loiter on it i Havent chang much other then psc parameters
2022-07-01 17-10-58.log.param (18.3 KB)