Hello, I try to put in fligh 40Kg quadrotor with x11 motors.
I make all the process of pid tuning with stabilise and altold and loiter.
All it’s perfect, BUT we have big issue for take off.
in stabilize mode I ramp up slowly the throttle to take off, but in alt old or GPS, the AP push instantanely the power to take off, and make very wooble take off.
I’m affraid on one try I almost crashed, the UAV toke 60°roll and 50°pitch…when angle max is set to 30°.

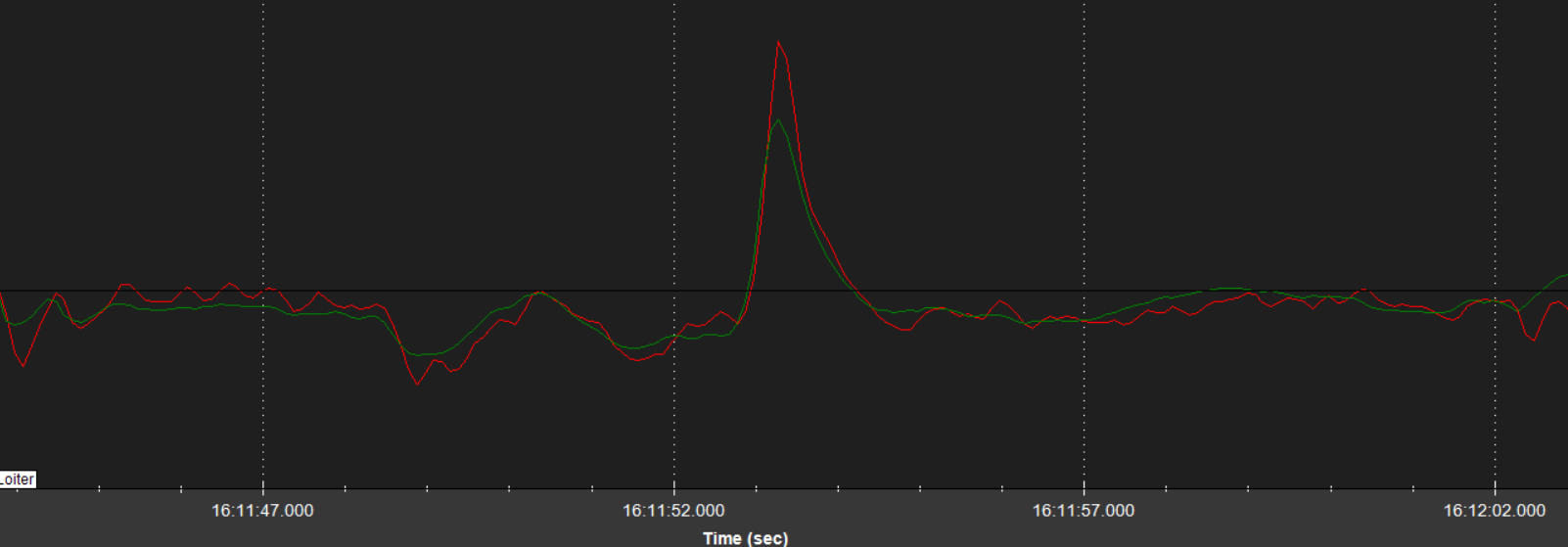
check loiter att roll des roll:
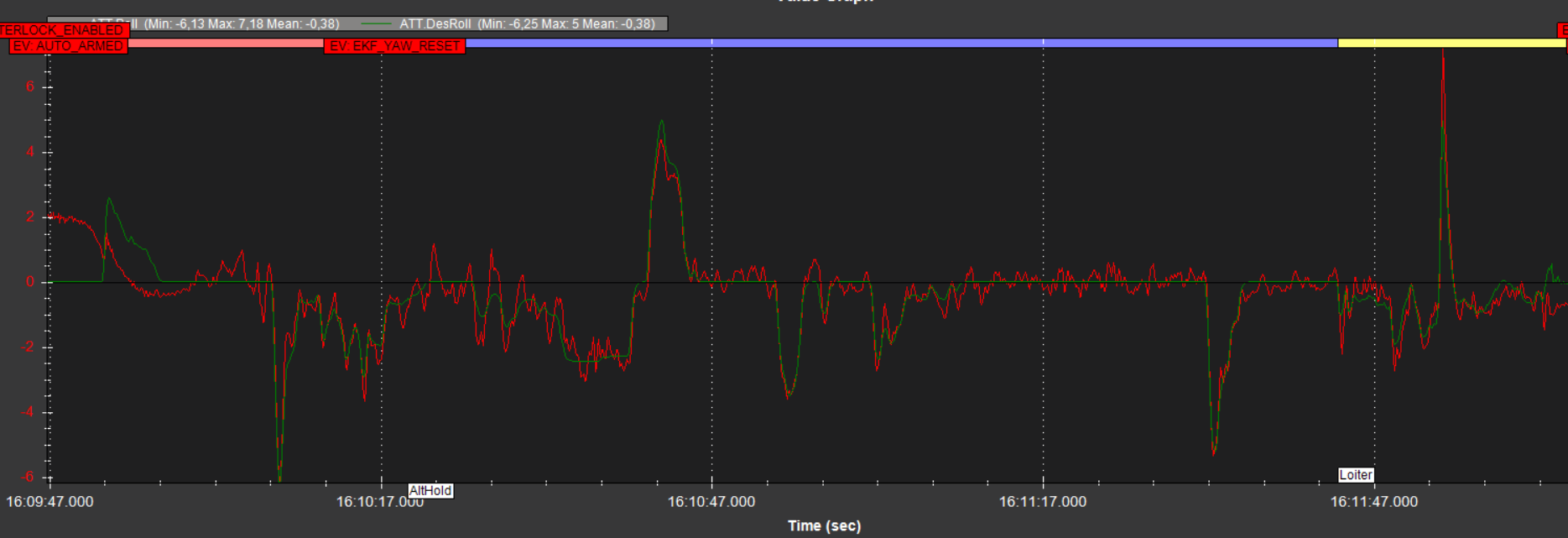
check alt old roll des roll:
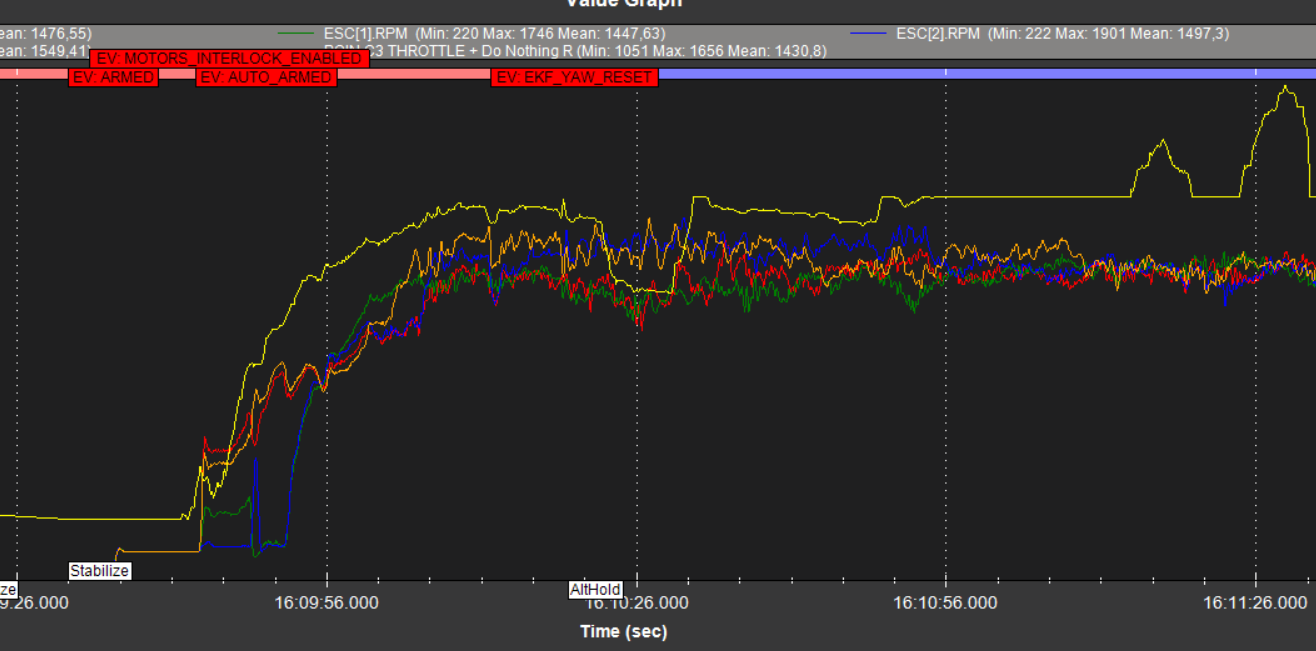
motor rpm when I take off in stabilise with rcin3:
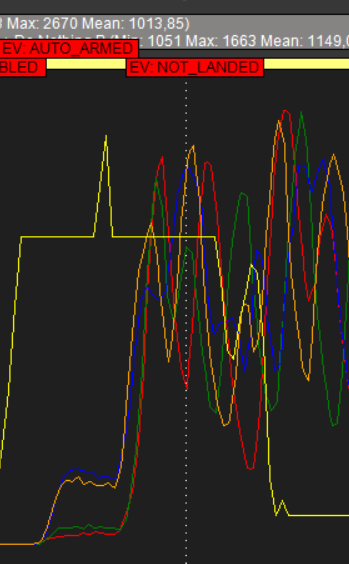
Motor rpm when I take off in loiter with rcin3:
There is something to tune with MOT_SLEW_UP_TIME ?
Thank you for your help.