Additional information;
The copter did fly well after autotune.
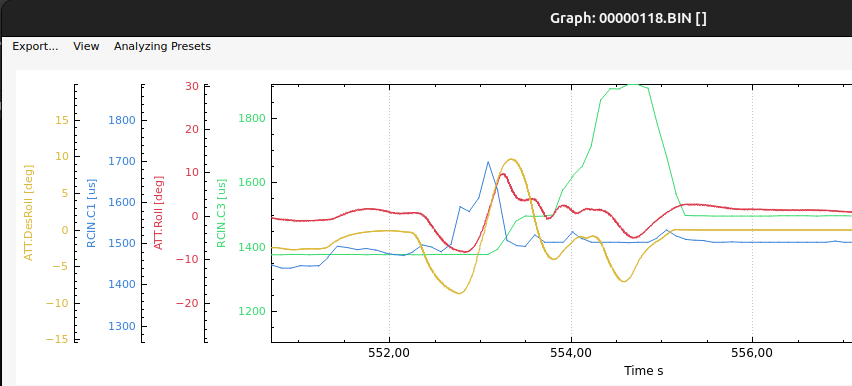
On every landing (still in autotune, after a successful tune), as approached the ground, it did a sudden attitude change. At least once per landing.
Not reproducible in the test following flight. (stabilize/althold/poshold/loiter) - all behave as expected.
This seems to me like something very off happening only after a autotune.
Please note that the first tune was Yaw, the second Pitch, and both produced this nasty effect.
Rangefinder is present.
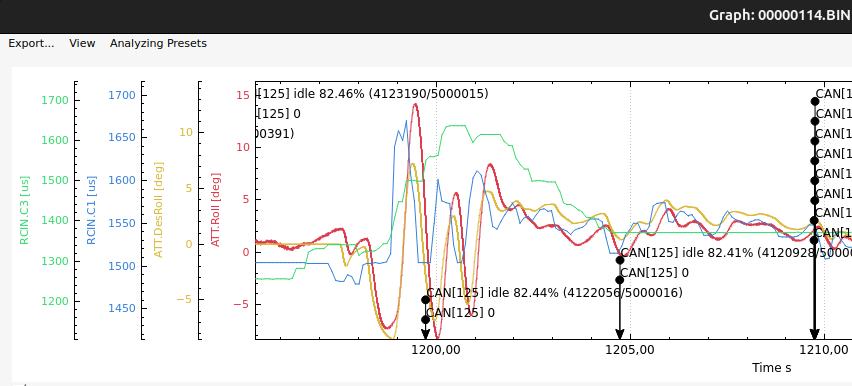
(and why are there so many CAN messages spamming the messages?)
All I can think of it might be an issue with the MOT_THST_EXPO you have set.
I would try something slightly lower, like 0.76 and test with ascents and descents.
You may need to retest and set MOT_SPIN_ARM and MOT_SPIN_MIN.
Hover thrust might need to relearn a bit - then you will have to check these:
Depending on the differences in flight, it might even be worth running Autotune again - especially after these recommendations below based on your existing params, which will get the Harmonic Notch Filter working as it should: