Hi,
it is now the 3. time i have an verry bad issue with 50% throtte fix after switching back from fbwa to QHOV.
at first time i have this issue i tryed to land with qrtl but throttle was fiexed to 50%. At this time it was spezial firmware of trigide for VTOL.
At second time i had no cf-card inside, but it happe with stable 4.1.0
As a supplement: @satsepp1 has the problem that after activating QHOVER 50% throttle is output according to OSD and the quad rises instead of hovering. No matter how the throttle stick is moved.
I have worked my way through your posting. The problem is obviously that in QHOVER mode the VTOL climbs higher and higher, although the throttle stick is centered.
I have looked at the log file and the corresponding video (first one in your post)
First of all, it is noticeable that you still have EKF2 activated.
In my opinion, this is no longer necessary, because EKF3 works well now.
It is noticeable that you armded in FBWA mode so the VTOL wanted to start the transition while still on the ground. You quickly noticed this and returned to QHover. However, the transition logic was still running.
I speculate that this perhaps caused some integrator to overflow and the wrong altitude control to take place.
I would never arm a VTOL in FBWA and with EKF3 activated only when the message “EKF3 active” appears in the messages.
To be on the safe side, you can switch back to QStabilze (with throttle in center position!) if the VTOL should climb away again in QHOVER.
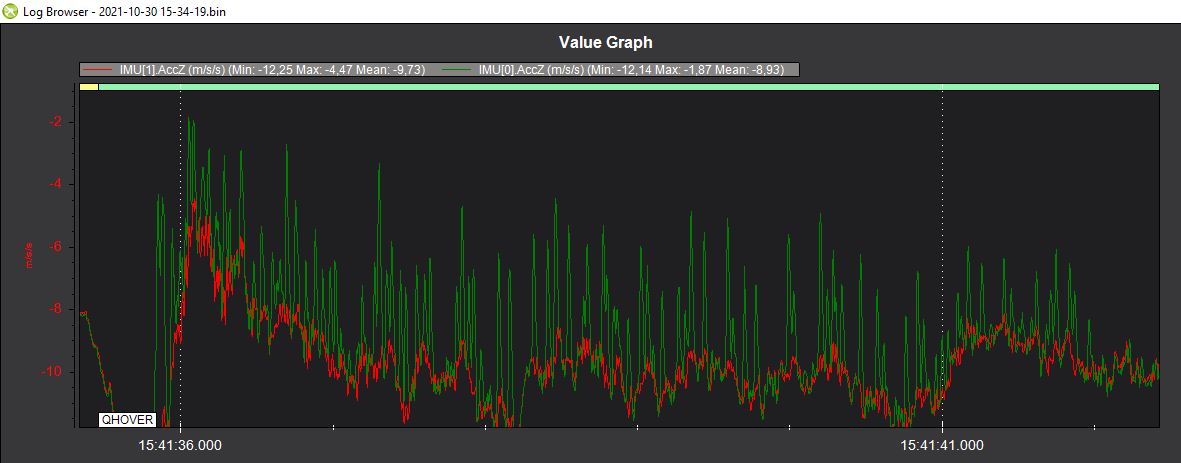
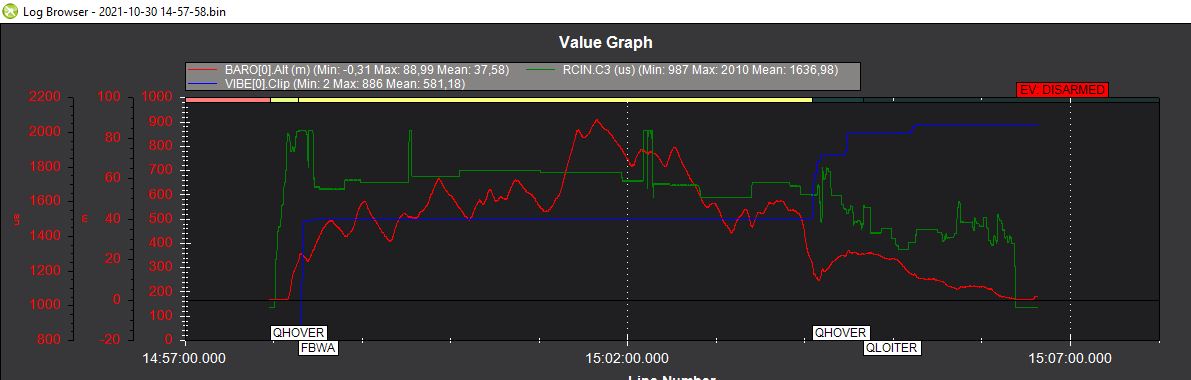
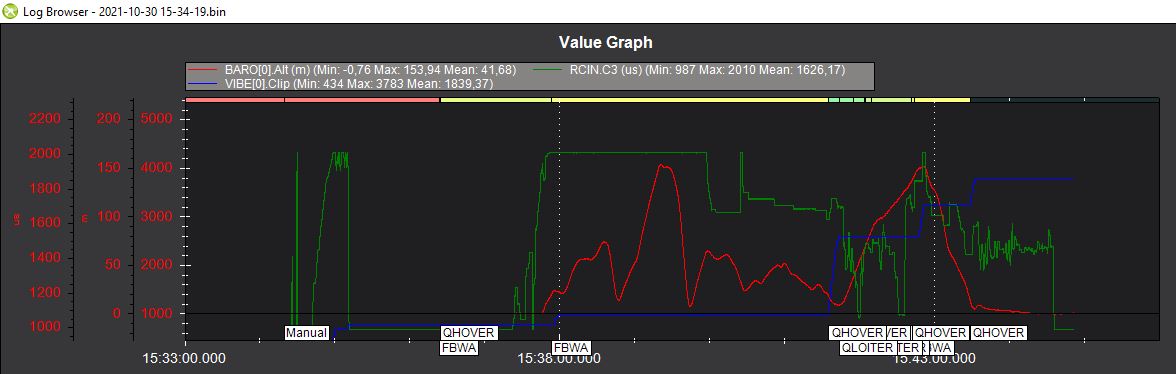
the climbing like crazy in QHOVER could have something to do with too high vibrations. I have now taken a closer look at the vibration levels of the two flights from yesterday (2021-10-30 14-57-58 BIN and 15-34-19 BIN).
In both flights, there are significantly higher vibrations on the IMU[0] than on the IMU[1]:
Acceleration values of the IMU[1] are not clipped in either flight, at IMU[0] there are 886 clippings in the first flight and 3783 (!) in the second flight. According to WIKI it should not be more than 300. Therefore this would be an explanation for the fact that the first flight still ran without the issue, but on the second flight (3783 clippings) the uncontrolled climb in QHOVER occurred again.
Hi Rolf,
i Think the problem at this day was wrong setting to ESC for 5. Motor. It has verry bad funktion at higher throttle. And the power-cable running close to FC, maybe that will have as result this difference?
After first flight i changed setting to ESC, it is running much smoother now.
But yesterday at fiorst flight i have same issue with climbing at 50% thottle:
Congratulations on your Dart XL VTOL! Have you tried switching to QSTABILZE when landing instead of QHOVER? I typically use QSTABILIZE to get better throttle authority when landing a VTOL manually.
I bought a Dart XL this past summer and got it flying nicely using a stabilized FrSky X6R receiver. It flies very nice and hand-tossing seemed easy enough. This winter, my plan is to add a mini Pixhawk inside with Ardupilot Plane firmware.
At this time, I don’t have any plans to make it a VTOL but I will follow your progress.
Thanks,
i have not tryed QSTAB until now, at most time i use QLAND or RTL which switch himselv to QRTL with the smaler VTOL. The DartXL has verry strong motors, so i have lot of respekt of them and have land him moste time manualli with qhov.