I’m not aware of any actual top speed limitation. Sometimes the GCS may limit the values you can input but these can almost always be bypassed using Mission Planner’s Full Parameter Tree screen (other GCSs have equivalent screens I think).
just to clarify, copter 3.x had 20m/s limitation in auto, this is fixed?
I don’t recall this being the case.
Ah, you mean a WP_SPEED value over 2000 that wouldn’t persist in MP?
you could put any speed you wanted and it would attempt the speed, but it had a problem advancing to the next waypoint before hitting the previous when using speeds above 20 m/s (MP also stated 20 was max)
This is improved with Scurve navigation starting with 4.1.0 Beta 1
1 Like
@Iketh thanks for bringing this up. I think @dkemxr is correct.
I tested in SITL and by reducing the simulated vehicle’s weight and drag and also increasing the ANGLE_MAX and WPNAV_SPEED parameters I was able to get it up to 28m/s on a long straight mission.
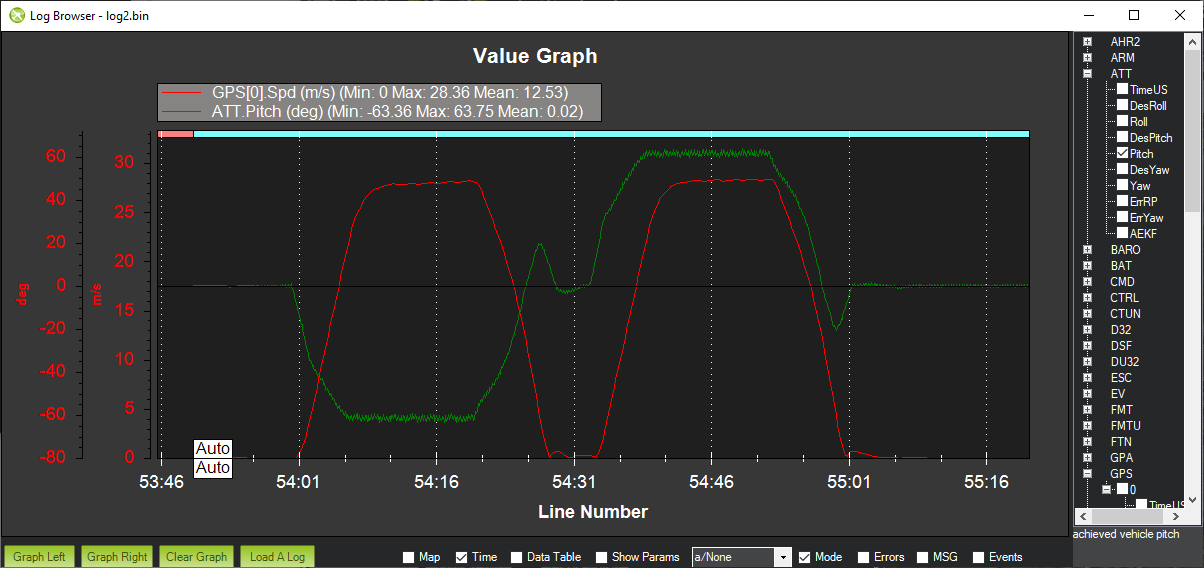
After a chat with @Leonardthall it seems that we still have a hard-coded lean angle limit of 60deg somewhere that we need to remove but most vehicles cannot maintain this lean angle and stay airborne in any case.