Hi
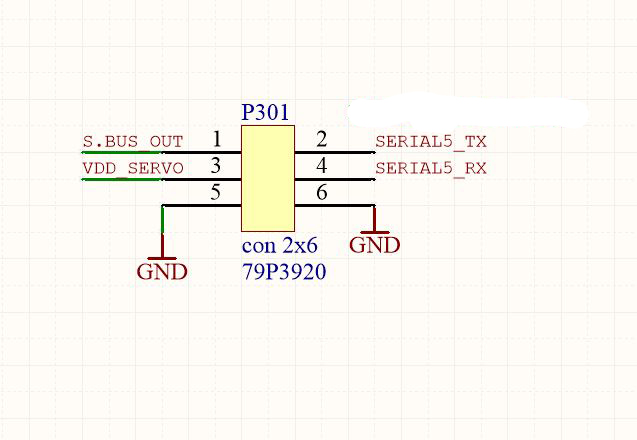
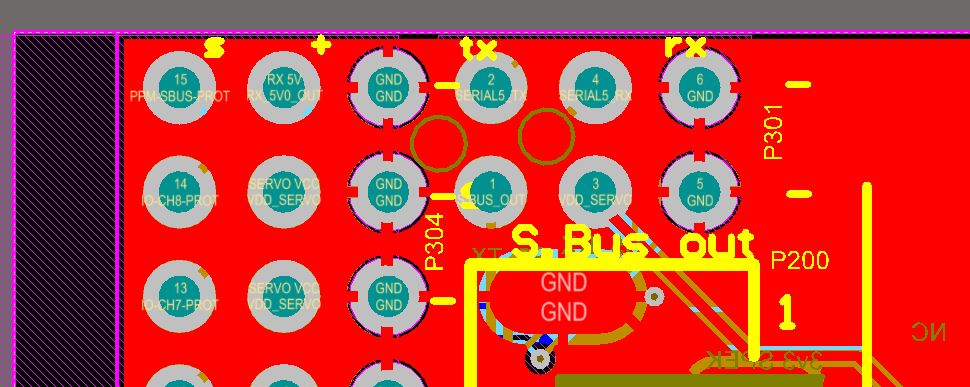
In my Pixhawk 2.1 I have 2 telemetry ports. One is for graupner telemetry, one is for silk telemetry and now I would like to use third telemetry for connecting mavlink with alexmoss gimbal. Which port should I use in Pixhawk 2.1 and what I have to change in parameters in arducopter ?
regards
Also, the GPS 2 port is SERIAL4. You can use that if you don’t have a second GPS.
1 Like