Please analyze attached log. I don’t know what is going on. 100+ flights (short and long) and suddenly everything has gone crazy. I must have done something, but tracing back cannot think of any changes made prior to having these problems. 3DR even sent me a new GPS.
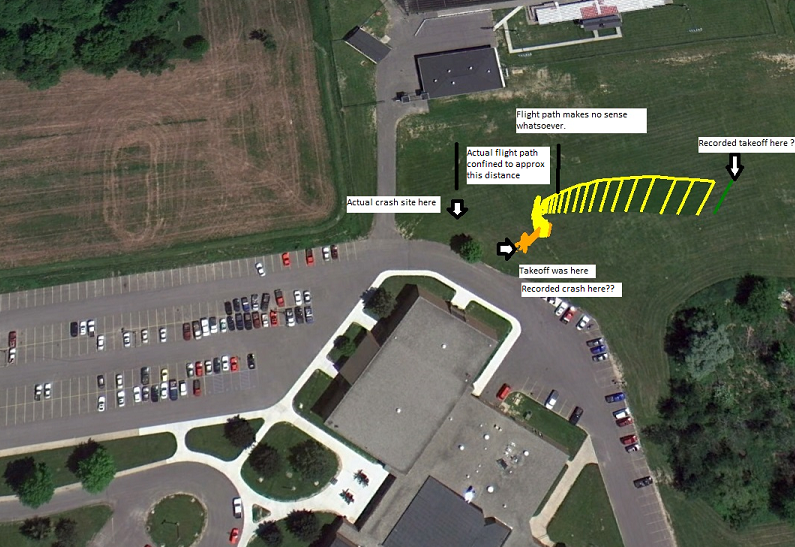
I posted at DIY Drones http://diydrones.com/forum/topics/y6-out-of-control-crash-flight-mode-error-just-all-around-mess and thought maybe had it figured out as there was a similar crash yesterday. Everything was calibrated again, checked the flight modes, tested FS…all seemed ok. I went to my practice field, went through the pre-flight checks as always, took off in stabilize mode, then switched to PosHold and it started acting flaky again. Actually I’m not sure PosHold even works (see flight mode error) Rather than fight it, I switched to RTL and all hell broke loose. It made a bee line at or near full throttle at about 30 deg angle. I tried switching back to stab mode, but it was too late or as before lost all control of the craft.
It crashed in tall grass; broke two props and probably a motor. Had it hit 6 ft closer it would have been a twisted wreck. My luck is going to run out.
The post you quote about setting the COMPASS_ORIENT to 8 was in regards to an APM. Your log says you have a Pixhawk. Assuming you are using the 3DR GPS puck, and have its arrow pointed forward, that value should be 0. This will screw you up big time and make your craft fly away. I happened to see exactly this today, for this reason.
Next item…PosHold doesn’t exist in 3.1.5, which is what you were running. It’s only in the 3.2 RC releases. You were in Stabilize the entire time until you did a RTL. The controls work very different in the two modes and the response to your inputs weren’t what you expected.
The flight error you note is in regards to the Extended Kalman Filter (EKF) which is something that’s not currently active in 3.1.5. So that’s probably safe to ignore for the interim.
So you had a lot going wrong with this flight. I’d suggest you go though the setup for the craft very carefully and check all the parameters. Perhaps load an earlier parameter file you might have saved for safekeeping.
Everything you say makes sense except that I sent the GPS back for replacement from 3DR because about 10 days ago I was hovering around the yard and even if PosHold mode doesn’t exist yet , I had no control over it in either Stab or Loiter. It just gently drifted into a low lying tree and veggie blended into the ground but nothing was damaged. Moving the sticks had no affect. Two days prior it was flying perfect for weeks. The only change was I added FPV, but it was not powered and no copter wiring was disturbed…wanted to make it easy to remove.
Keep in mind this was Super Simple mode, which uses GPS, so the first thought was GPS was failing causing the copter to jerk around and eventually lose control. Then I sat the copter on the lawn and watched it wonder all over the yard on the MP map. I captured the video of that and sent log files to 3DR which prompted the RMA for a new GPS. I’ve heard performing ESC calibration can cause weird issues, but I had done that several weeks previous. Throttling on the ground seemed normal.
If what you say is true about COMPASS_ORIENT whacking RTL, it was very dumb of me to change the setting to 8. I misunderstood Randy’s post. Why would it go full throttle into the ground though? It did the same thing yesterday without RTL. One second it was hovering, then it decided to take off full tilt and crash. COMPASS_ORIENT was 0 so that couldn’t have been an issue.
Maybe the tx is malfunctioning, who knows.
I think I’ll reset Pixhawk and start from scratch after assessing the damage.
on the logs you activated RTL and it went sour from there. RTL with a bad compass_orient does that . It drifts slowly and loose complete stability and goes to the ground at some point. And in RTL, the TX input are limited. The copter was fighting like hell to try to stabilize but with the disorientation, it did not manage to stay in the air and answer your inputs.
on the logs you activated RTL and it went sour from there. RTL with a bad compass_orient does that . It drifts slowly and loose complete stability and goes to the ground at some point. And in RTL, the TX input are limited. The copter was fighting like hell to try to stabilize but with the disorientation, it did not manage to stay in the air and answer your inputs.[/quote]
Thanks.
I don’t disagree with that assessment for the Sunday flight. However it does not explain the crash on Saturday which COMPASS_ORIENT was 0, or the first tree trimming event prompting a 3DR support email.
Up front, the copter had 2 batteries on the Saturday flight thereby requiring more throttle to hover. While in Loiter mode (super simple), it decided to go off on its own and accelerate into the ground. I had no control over it. That was the whole reason for returning the GPS for a replacement the previous week.
143 is Saturday
140 is from two weeks ago
It appears to me any flight mode that relies on GPS causes the copter to lose it’s orientation and eventually decides it needs to move away very fast and all manual control is lost at that point. I have a spare motor and props…will reset Pixhawk and redo all calibrations. If that doesn’t fix it, then I’m at a complete loss as to why this is happening. I really appreciate the help analyzing the logs, but I can assure you having over 100 flights under my belt on this Y6, it is not going to 3/4-full throttle and zooming away because I’m giving it the wrong commands from the tx. Once it decides to move, I have no control. ESC? Motor failure? I don’t know.
on the logs you activated RTL and it went sour from there. RTL with a bad compass_orient does that . It drifts slowly and loose complete stability and goes to the ground at some point. And in RTL, the TX input are limited. The copter was fighting like hell to try to stabilize but with the disorientation, it did not manage to stay in the air and answer your inputs.[/quote]
Thanks.
I don’t disagree with that assessment for the Sunday flight. However it does not explain the crash on Saturday which COMPASS_ORIENT was 0, or the first tree trimming event prompting a 3DR support email.
Up front, the copter had 2 batteries on the Saturday flight thereby requiring more throttle to hover. While in Loiter mode (super simple), it decided to go off on its own and accelerate into the ground. I had no control over it. That was the whole reason for returning the GPS for a replacement the previous week.
143 is Saturday
140 is from two weeks ago
It appears to me any flight mode that relies on GPS causes the copter to lose it’s orientation and eventually decides it needs to move away very fast and all manual control is lost at that point. I have a spare motor and props…will reset Pixhawk and redo all calibrations. If that doesn’t fix it, then I’m at a complete loss as to why this is happening. I really appreciate the help analyzing the logs, but I can assure you having over 100 flights under my belt on this Y6, it is not going to 3/4-full throttle and zooming away because I’m giving it the wrong commands from the tx. Once it decides to move, I have no control. ESC? Motor failure? I don’t know.[/quote]
Will look at the logs tomorrow but if you reset evertyhing, check the hud that the compass shows the right information when you move your copter on the bench.
To date since the first incident when I contacted 3DR:
GPS replaced
GPS and MAG cables replaced
re-situated wiring
re-calibrated GPS and compass twice
Here is a video of the copter sitting in the front yard. The tree shown on Google Maps is no longer there. This is a clear shot to the sky with zero clouds at ~10:00 PM. I don’t recall it wondering all over the place when it was flying good. youtube.com/watch?v=c77i0Xo … ata_player
It doesn’t seem to matter what the hdop value is, it jumps around the yard. My WAG is once off the ground it can’t lock into position in Loiter and continually tries to move around, gets confused and…does its own thing, whereas in the past it held position rock steady no matter what altitude. Why it suddenly decides to raise throttle and race off has me baffled.
3DR looked at that video/log and determined the GPS unit may have been defective, so they replaced it. I must say CS and Tech Support at 3DR has been stellar since the purchase of my Y6.
Tonight I will reinstall the Pixhawk firmware and see what happens.
looked at 143.log and I am not 100% confident but I believe you had a GPS glitch but detected way too late.
You were in loiter mode, RC inputs have very limited influence in loiter.
You switched to stabilize 300ms before the crash. it would have recover if switched before.
The GPS glitch detector did not trigger soon enough either.
same thing on 140.log. You lost the gps in loiter mode, the copter went all other the place and gps glitch detection did not detect it.
GPS sats was going strongly at 11 then it went up and down between 5 and 9 and hdop between 1.6 and 9…
I dont know if it was a bad gps or just interference or solar radiation but surely switching to stabilize would have stopped it wandering around .
[quote=“badzz”]same thing on 140.log. You lost the gps in loiter mode, the copter went all other the place and gps glitch detection did not detect it.
GPS sats was going strongly at 11 then it went up and down between 5 and 9 and hdop between 1.6 and 9…
I dont know if it was a bad gps or just interference or solar radiation but surely switching to stabilize would have stopped it wandering around .[/quote]
My reaction times aren’t that fast. Also, there is a .5 sec delay in the Taranis when switching modes.
Remember though, even in stabilize mode it uses GPS (super simple).
Another screwy thing happened tonight. Flyaway telemetry? I had copter outside again to monitor the wondering around on the MP map, took it in the house, lost GPS fix (of course), walked over to the pc and thought I was seeing things. Anyone have this happen? youtube.com/watch?v=uNJy5rI … v6caYfx9OQ
All of your issues are GPS issues, save for your original (which was definitely incorrect compass orientation).
The GPS flying away slowly is probably caused by INAV not resetting until the GPS comes back. it’ll fly away at a velocity that increases proportional to time. Nothing wrong with that - it’ll just get reset as soon as the GPS is back. Could also be the GPS’ internal filter flying away.
Please send a photo of your setup. What transmitting radios do you have mounted? Where is the GPS in relation to those? Optionally also send me a 3.2 RC dataflash log so that I can look at the GPS’ jam indicator and other metrics.