Hey Guys a few weeks ago I bought a 3dr solo second hand.
During my first flight, I realised that the throttle channel is inverted. If I push the throttle stick upwards, the motors lowers the rotation speed and inverse (throttle stick to the pilot, motors spin up).
I thought, no big deal, you can change it in the tower app.
But if i inverted the throttle channel in the app, there are no changes.
I made a factory reset, but no changes.
I tried a stick calibration, but no changes.
Has anybody had the same problem?
Is there the possibility to change the parametes with the putty programm on the transmitter?
Any ideas are welcome.
I want to change my transmitter to Mode 1. By now all channels are on the correct stick and axis but unfortunately the throttel channel is inverted (so when I want to increase speed, it actually decreases it).
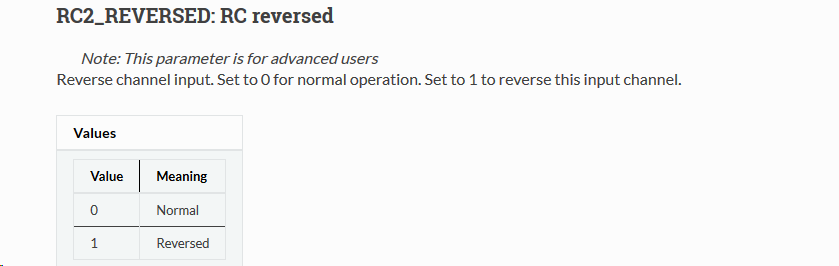
Therefore I changed the RC1_reversed (or RC2_reversed, I am not sure) parameter in the tower app, but this did not solve my problem.
Yes you are right, but in my last post I mean the rotation speed of the motors.
I tried to reverse the corresponded throttle channel with this parameter.
It is so strange, if I check the throttle channel in Mission planner (fail save) the moves are still inverted and at channel 2.
But I inverted channel 3 (RC3_reversed) without any success.
Or is the throttle channel a special named channel?
Or do you know, can I change this in the solex app?
Switching the controller between mode 2 and mode 1 does not require any reversing of any channels. You should not be reversing any RC channels on the Solo.
Hi Matt
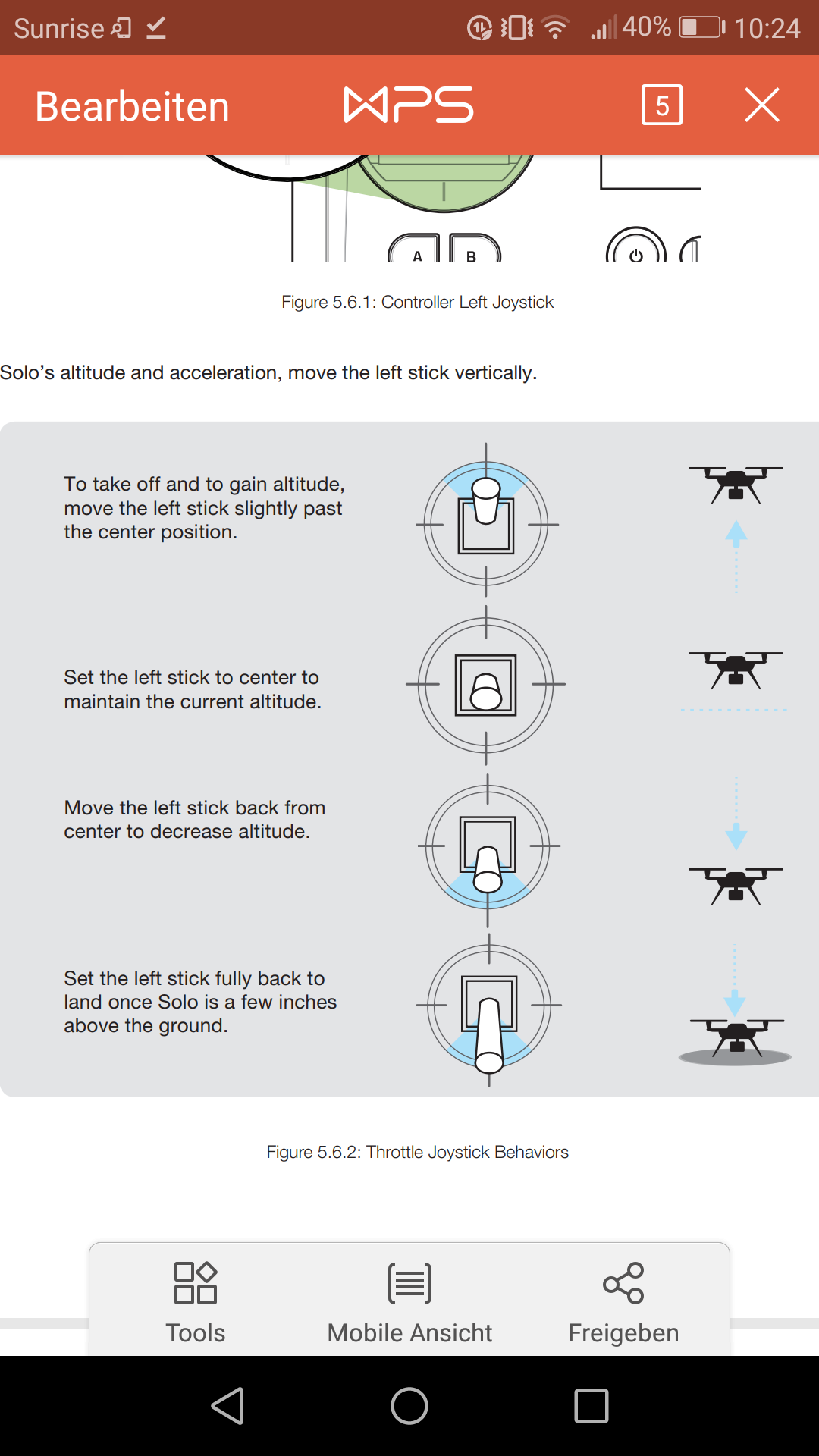
The screenshot shows the situation from the solo manual. But my radio is always reversed to this condition. Even after a facorty reset.
So I have to reversed the throttle channel, because I am used from my other copter.
And if I should not reversing any channel, what should I do?
Greetings
Hi Mike,
I am not sure, about mode 1, because I set it to mode 1 (the solo app said: throttle on the right side) but Mission planner and the solo react like mode 2.
So I changed to mode 2, so everything worked with the exception that throttle is reversed.
I thougt this is a bug in the app, or my mobile phone make same strange things.
What do you mean with:
What does the RC Calibrate look like?
Could you please advice.
Thank you
Benji
When using Mission Planner as a ground station app one of the pre-flight setup steps is calibrating your radio. So Mission Planner shows the basic set of sticks and has you move them the full range of motions. You can see by the direction that the “green bars” move how Mission Planner sees your stick movements and what the PWM values are.
thank you for this hint. I sorted all channels according the channel mapping. So all channels work like the link says. Only pitch is inverted. But this should be okay.
I made an rc calibration.
Unfortunatelly it is to dark for a test flight.
So I hope everything is fine, otherwise my wife will kill me…
Also note in regards to pitch it functions that opposite to all the other sticks in the Radio Calibration in Mission Planner. Moving the Pitch stick “up or away” from you causes the green bar to go down not up. But this is correct. Think about how you move the aircraft forward or away from you. You have to lower the power to front motors so the front of the aircraft tilts down and some of the thrust is pointing backwards. So the pitch stick must lower power to the front motors when it is moved Up/foward.