In the initial parameter tuning in MS, I had to provide the correct propeller and battery data.
Reduced the maximum angle to 10 degrees (for testing purposes), as 30 degrees was too much. With this weight, the drone couldn’t stabilize after rapid movements (the default was 30 degrees).
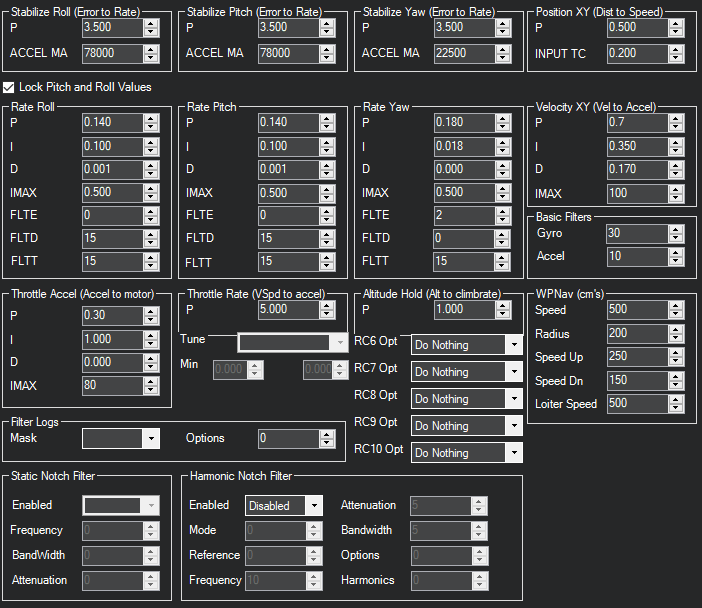
Tuned the PIDs with basic adjustments to make control smoother. This helped eliminate oscillations caused by vibrations from a non-rigid design.
Currently, it has a stable hover without whistling or oscillations.
Hey, thanks! For now it is not possible, I still dont know what to do with this design and it is not finished yet. It might be future commercial or other purpose project…
Hey Andrii, nice design. Ive been working on a similar printed VTOL. After 10 or more hover flight I finally did a transition. Went very well.
I was also struggling with PWR but after trying many different props and providing thicker wires inside my Li-Ion pack, all seems good. Did you think those crashes were tuning? I can see the original tune is very energetic but that fall looks like ESC/motor giving up.
You could probably put up the bin. logs so people could take a look.
Mine is Tilt-tri 3.6kg 1.7m.
See my (ignored) post in this section.
Weight: The previous fuselage design added unnecessary weight. The new structure is significantly lighter, contributing to improved efficiency.
Functionality: The previous section contained no electronics, serving only to connect the V-tail to the fuselage and wings. This has been streamlined in the new design.
Transportability: The new design allows for easy disassembly, as the V-tail is now secured with latches instead of glue, making transport much simpler.
Overall, the new design reduces weight (approximately 1 kg), lowers costs, and increases flexibility. Additionally, given the previous center of gravity offset, I’ve minimized the need for nose ballast with this lighter configuration.
Unfortunately, I didn’t insert an SD card, so I have no logged data from before the crash. It’s difficult to pinpoint the cause, but it appears the primary issue may have been the aircraft’s sudden tilt to one side. With a 6 kg plane already operating near engine limits, only one engine was left to counterbalance the roll and pitch dive, which it couldn’t manage.
Another indicator is the unusual engine sounds I observed during hover, potentially linked to improper PID tuning influenced by vibrations in the plastic structure. The ESCs are rated at 60A, so they should be adequate for the current engines.
I’ll proceed with further tests, gradually increasing the maximum dive angle to 20 degrees to evaluate stability under more aggressive maneuvers. For now, the current setup appears stable, and the next focus will be testing the transition mode.
FYI i was using LiPo 6ah 6s batttery all the flights
After attaching the rest of the wings and increasing the overall weight to 8 kg, I noticed another problem. The yaw behaves weirdly, almost like a rubber band. After releasing the yaw control, the plane doesn’t stay in that direction. Instead, it continues rotating slightly due to inertia before attempting to return. I hadn’t noticed this behavior before; it’s probably related to the increase in mass. I also installed an airspeed sensor, but it hasn’t been calibrated yet, so that might also be a contributing factor.
Airspeed sensor isn’t really used in hover. The issue likely comes from the significant increase in rotational inertia. Added mass is quite far from the CoM.
good job do you have the stl parts desgin>> i need them for my prot-project.
can you send link or massege me in whats up or telegram
967775856070 pleas
You have to retune PIDs for higher weight. It is not only the yaw, but Pitch and Roll as well. Yaw is always difficult to tune with VTOLs if the props are relatively small compared to the distance from center.