It was first flight that day. I armed the drone in Loiter mode and raised the throttle. It climbed about a couple of meters and oscillations started with angle up to 50 degrees. Drone with 32" propellers was too close to me and I dropped it on ground without any loss.
That drone was tuned by me before and has total flight time about 3-5 hours. It was not ideally tuned for strong wind and high speeds, but it was flying very predictable before.
When looking into logs I don’t understand what caused the drone to pitch for 50 degrees.
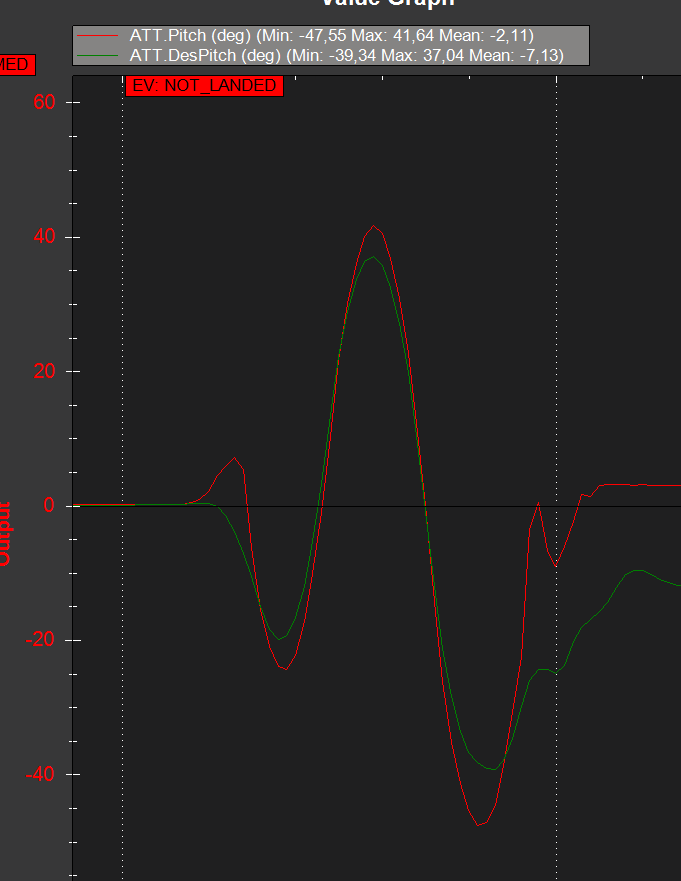
Att: Roll vs DesRoll looks good. Therefore stabilize mode pid tuning is acceptable
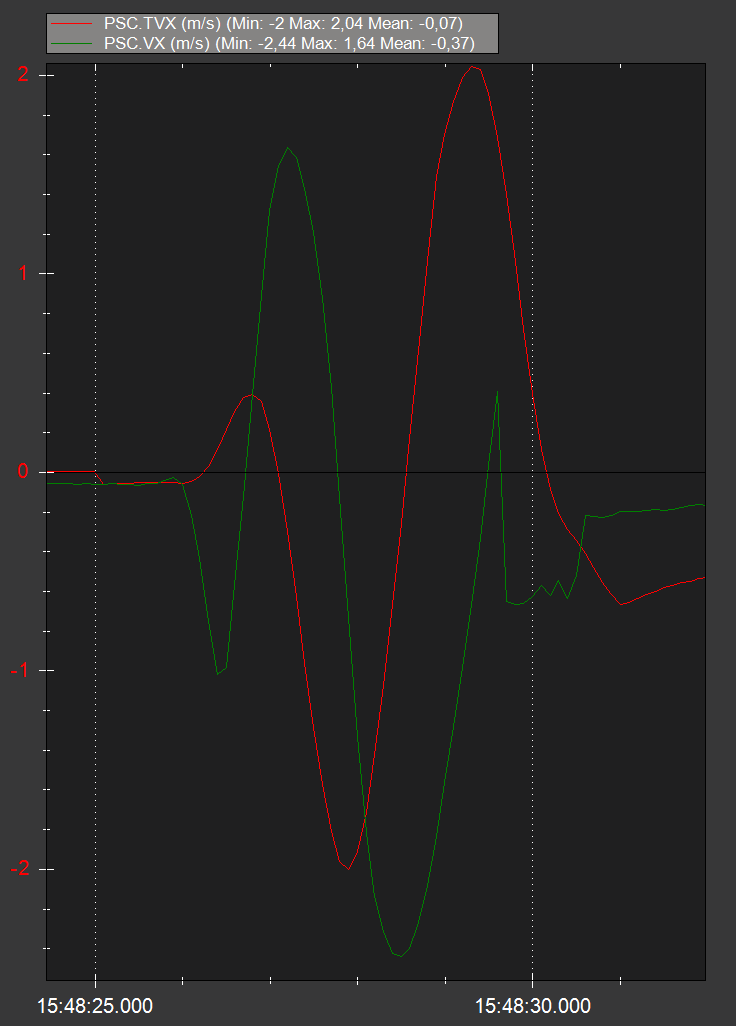
PSC: VX vs TVX looks totally incorrect
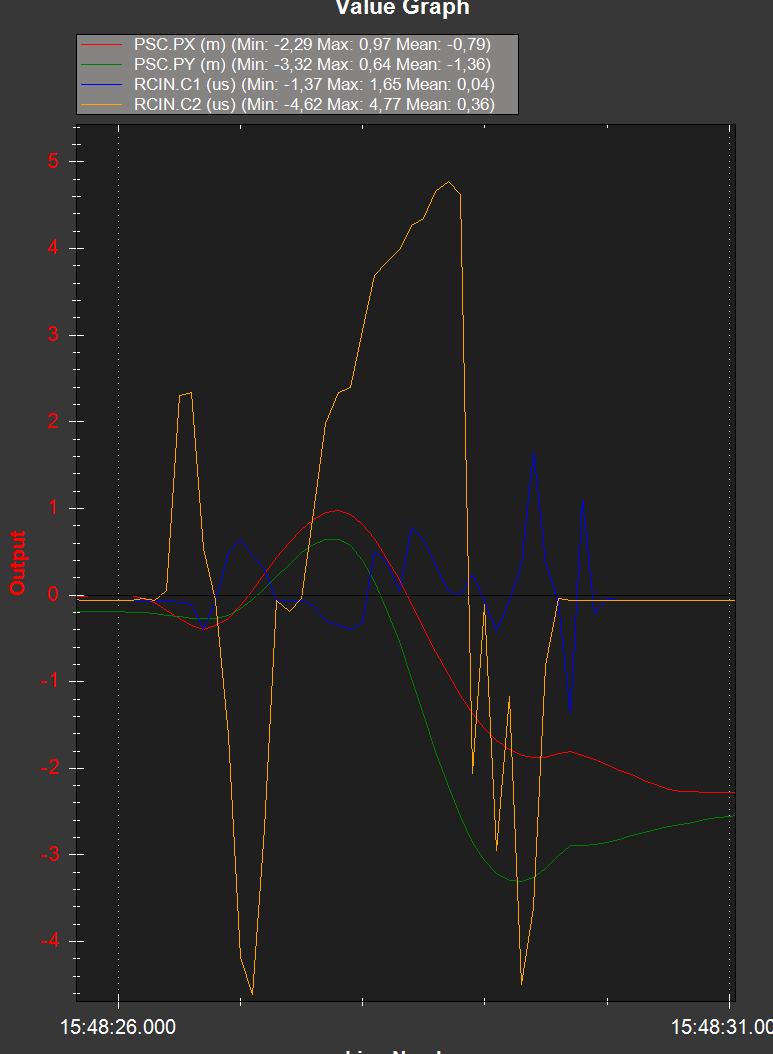
RCIN: I was compensating pitch angle with stick. It was better to switch to stabilize, but it was too close and too fast. RC1 and RC2 are normalized (/100 -15)
ArduCopter: 4.0.3
Log file:2020-07-10 15-48-17.bin (844 KB)
Parameters:crash 10 07.param (18.2 KB)