
log file https://drive.google.com/file/d/1Mabi3h6Wqo-UaE5zlFQo2Z5e6ykgIWLq/view?usp=share_link
The structure of the aircraft is relatively loose. If the PID value is too small, the aircraft will be unstable. Is the PID overadjusted?
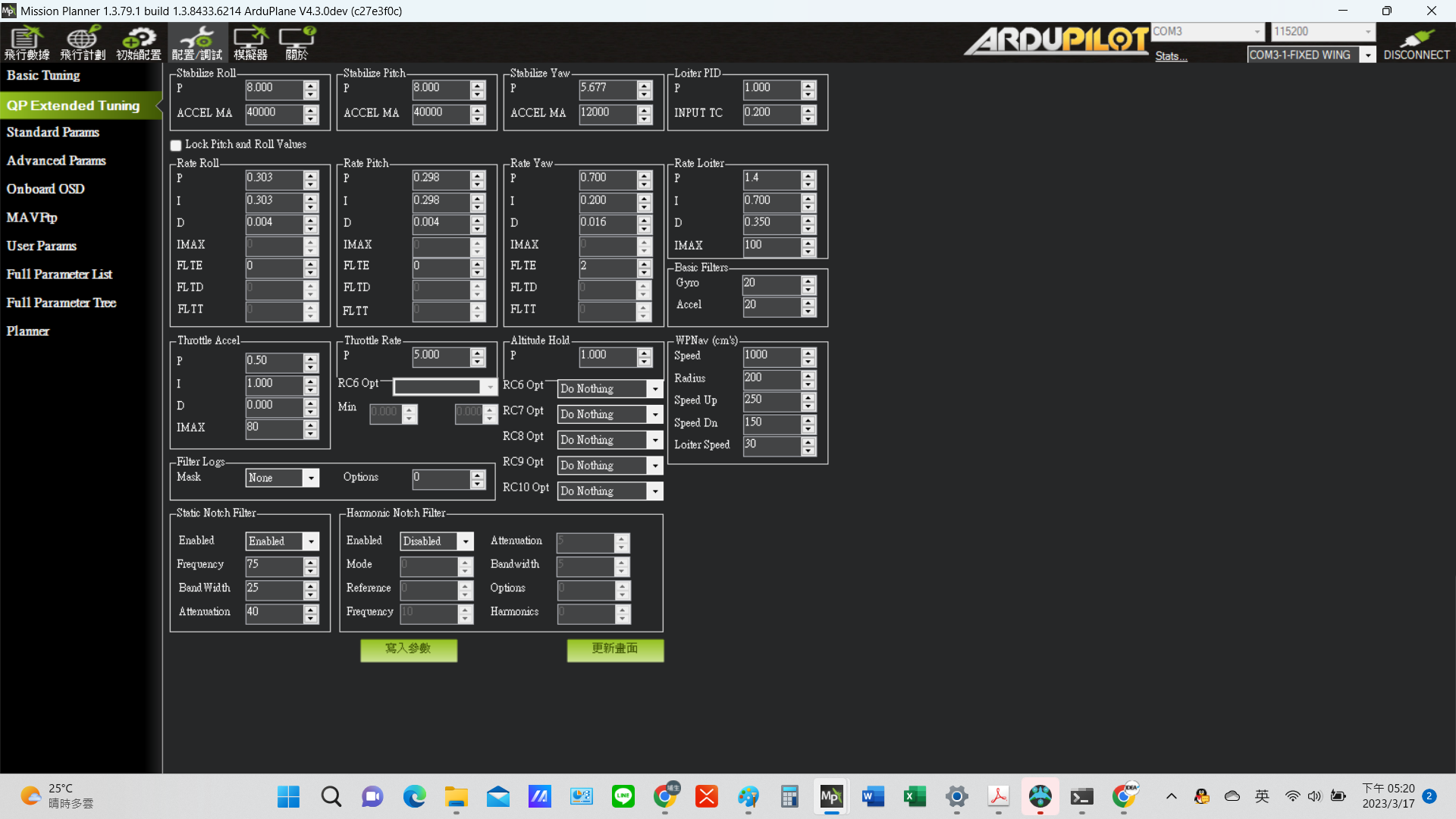
Attitude mode PITCH, ROLL, YAW can all be controlled, in LOITER mode only YAW can be controlled, others cannot