Are the servos connected properly? Honestly appears as if the servos aren’t doing a thing and the plane just happens to be is luckily flying with neutral control surfaces - there appears to be no response to demanded roll or pitch. The servo rail voltage is good, so maybe the servos are plugged in upside-down or something bizarre like that?
Considering it’s a wing, maybe it’s just a single servo that isn’t responding properly. Hard to tell, but that’s my best guess.
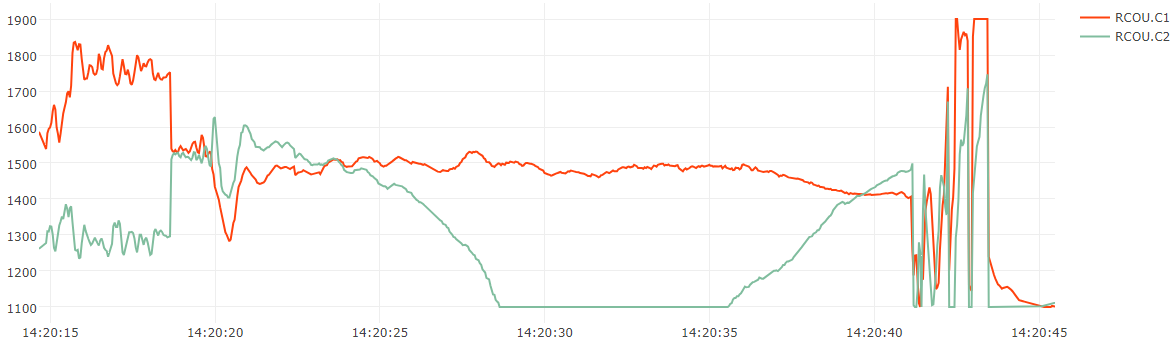
RCOU1 1500 = Right elevon level
RCOU2 1100 = Left elevon down
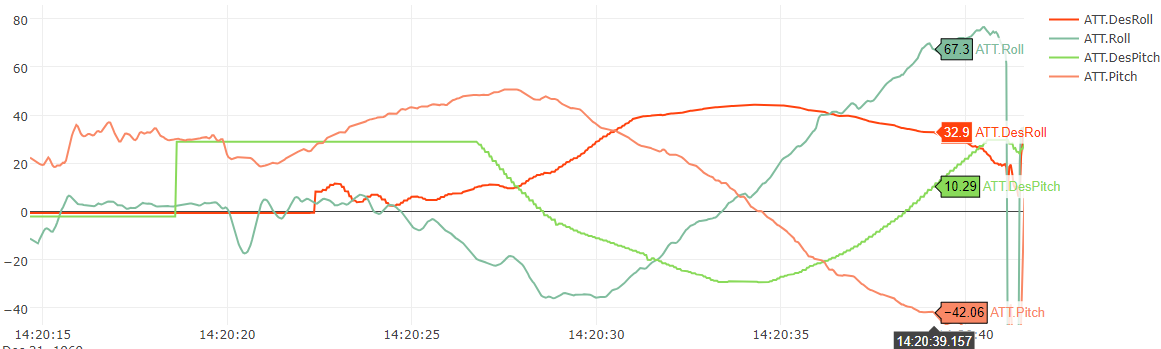
This will cause the airplane to roll right and down. So the airplane behavior is in agreement with the servo output. But the there is a complete separation of desired roll/pitch and roll/pitch.
I don’t think the behavior is in agreement with the servo outputs – at max deflection, your left elevon would cause a significant roll/pitch, and it would be fast. At max deflection, most aiframes will roll / pitch about 60 degrees per second. Your roll and pitch rates are on the 10 degrees per second, and your airspeed is high.
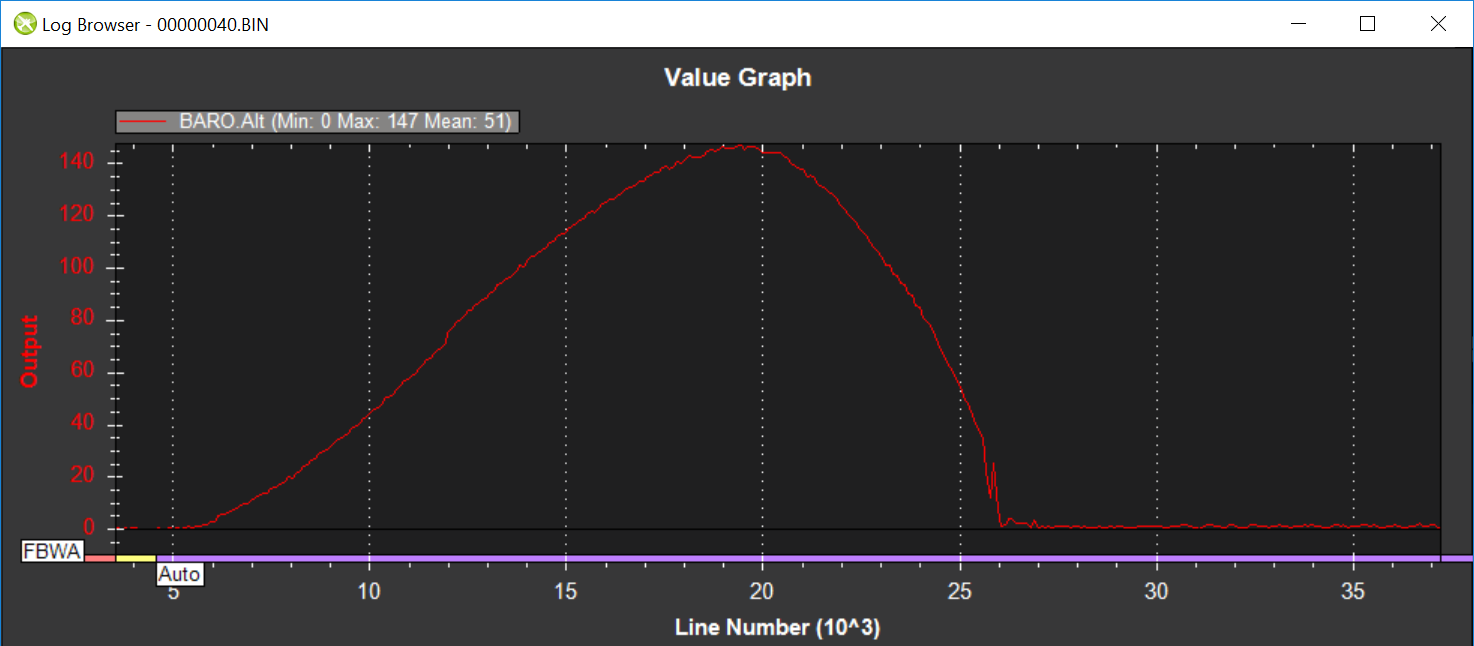
The aircraft is commanded to turn right, but instead it gently turns left and continues to climb. The control surface is ineffective at correcting the left turn and upwards pitch until the apex is hit. At that point, the speed just continues to increase, and although it turns right, I don’t see any signs of any response to servo output. Your airspeed is high enough, so it’s not because the plane was stalled.
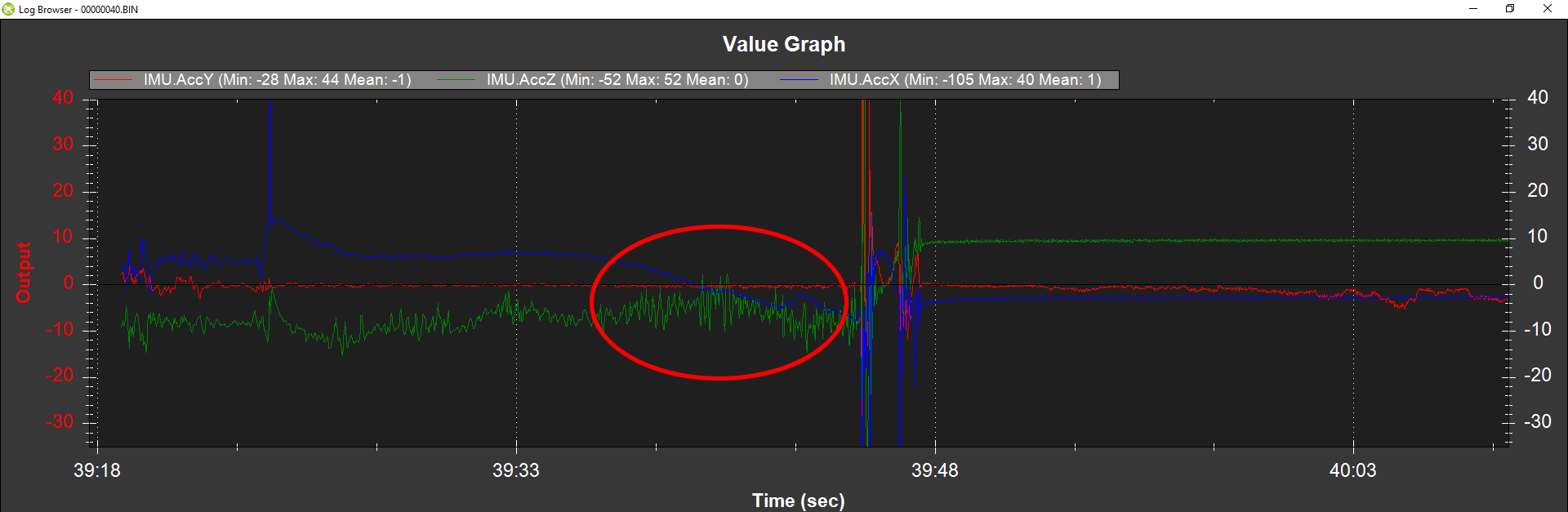
The IMU drops below zero around the apex of the climb. IMU.AccX is the acceleration in the forward/backward direction, so that makes sense. Think of sitting in an airliner, being pushed to the back of your seat is IMU.AccX positive while using airbrakes on landing is IMU.AccX negative. I doubt it’s related at all to the behavior here.
I think your airframe is trimmed extremely well to provide such a smooth flight path, and that’s why it was able to climb so high and maintain a very stable trajectory with very low roll or pitch rates. It’s by far the most graceful “uncontrolled” flight path that I’ve seen that ended in a crash.