I have had a couple of problems with my new quad when running autotune. The first time I was in loiter mode on the first flight when I started autotune and everything ran normally for about 30 seconds before it flipped over and crashed. I tried to download the logs but there was an issue with the sd card so wasn’t able to.
After fixing the copter I did several flights and tried to manual tune it without much success. It was fairly unstable but not so bad it was going to fall out of the sky and no repeats of flip over at any stage. Finally I though I would try autotune again, this time in alt hold mode in case that was part of the issue. It ran ok for several minutes this time before again trying to flip over. This time I was ready and had a bit more height so was able to switch off autotune and switch it to loiter mode and it recovered before hitting the ground. Yay!
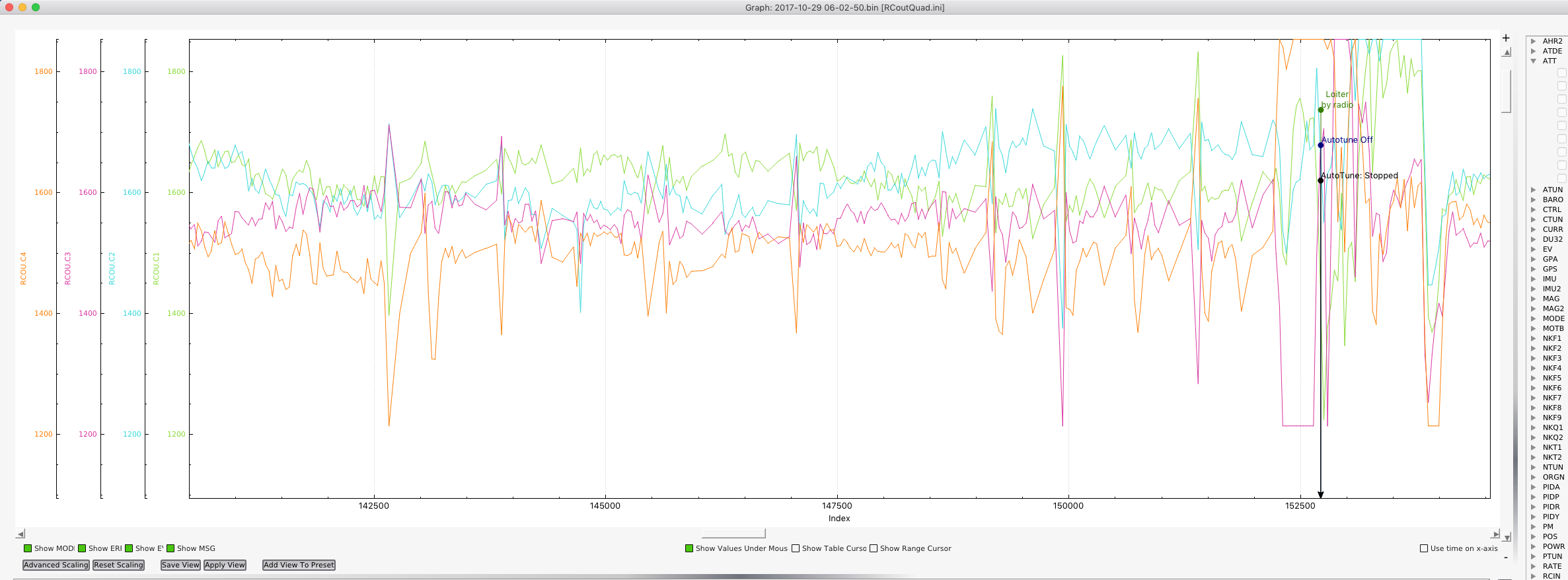
I have had a look at the log but I’m not really sure what I’m looking for. I noticed that the PIDA - P and I parameter seems to spike before it goes out of control but I couldn’t find any detail on what these are.
Perhaps someone would be able to have a look at the log and give me some feedback. Thanks in advance.
The quad is 550mm Quad running a pixhawk 2.4.8, ublox 7m GPS, 6s 10000mah battery, 30Aesc’s, 3508 380kv motors, 1447 cf props
https://drive.google.com/file/d/0B-k8g1vw2htGUGp4RGVoOUd3MWc/view?usp=sharing